mannequin.js
![]()
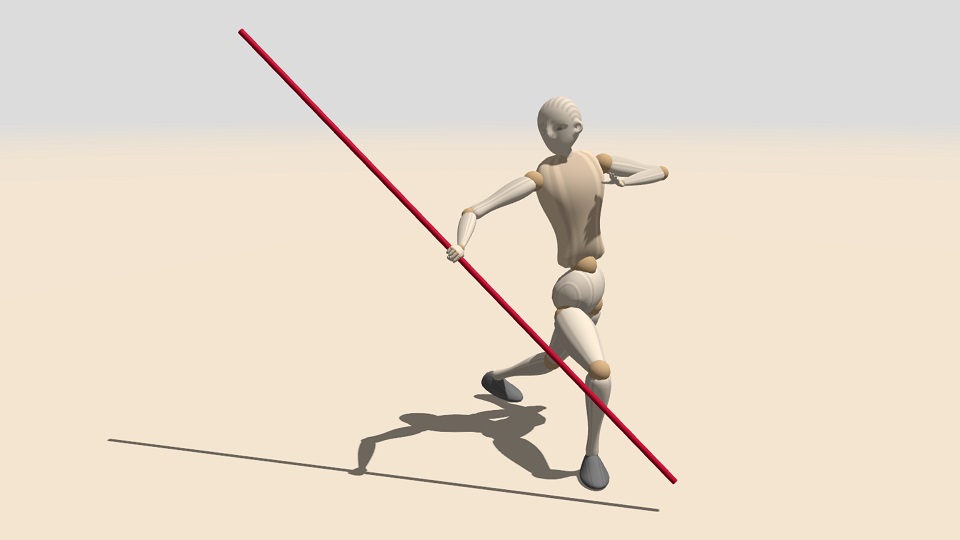
Mannequin.js
Mannequin.js is a library of an articulated mannequin figures. The shape and the movements of the figures are done purely in JavaScript. The library is used in the course Fundamentals of Computer Graphics for Computer Sciences undergraduate students from the Faculty of Mathematics and Informatics at Sofia University.
Documentation
Demos
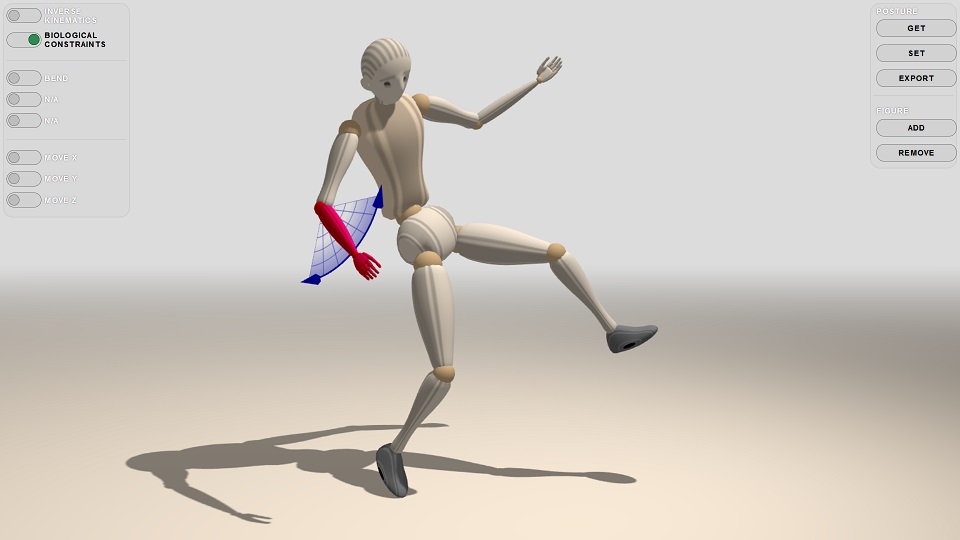
Posture editor
Community
List of sites that use mannequin.js or alternatives:
- SetPose.com – free interactive 3D model reference for drawing figures, dynamic poses, and more online drawing mannequin
- Marionettes – a client-side library used to edit and preview 3d-model postures