
Brainstorming Ideas
Contents
- Brainstorming Ideas
– Topology
– Sensors and feedback
– Interface
– Visual
– Postures
– Documents
– Initially needed information - Other Ideas
– Grip lock
– Grasp taxonomy
– Shoulder control - References
– Grasp reference
– Detailed hand
Brainstorming Ideas
Topology
- T1. [DONE] Custom skeleton (e.g. model 1 individual finger, or a hand with 6 fingers)
- T2. [DONE] Custom shapes (e.g. different 3D shapes of body parts)
- T3. [DONE] Custom degrees of freedom in joints
- T4. [DONE] Custom ranges of joint rotations
- T5. Inverse kinematics
- T6. Soft tissue and deformations
- T7. Dependant motors (they retrieve orientation from another motor)
Sensors and feedback
- S1. [DONE] Custom positions of sensors
- S2. [DONE] Feedback from joint positions
- S3. [DONE] Collision detection with external objects
- S4. [DONE] Self-collision detection
- S5. [DONE] Visual feedback with color heatmaps
- S6. [DONE] Visual feedback with vectors
- S7. Visual feedback with tables/graphs
- S8. Gravity for gripped objects
- S9. Velocity sensor
- S10. Accelleration sensor
- S11. Temperature sensor
Interface
- I1. Interface API for using from outside
- I2. [DONE] Programming control via API
- I3. [DONE] API for model definition
- I4. [DONE] API for model motion
Visual
- V1. [DONE] Interactive controls
- V2. Stock objects to grap and hold
- V3. [DONE] Importing GLTF body parts
- V4. Exporting GLTF models
- V5. Customs warning (aka virtual pain)
- V6. VR mode (with VR headsets)
Postures
- P1. Mapping between input data and posture
- P2. [DONE] Predefined collection of postures
- P3. Predefined animations
- P4. [DONE] Scenes with several models
- P5. Self-balancing of pressure
- P6. [DONE] Predefined models (e.g. hands)
- P7. Self-learning mode
- P8. Macros mode (e.g. grip for rod, ball, cup; handshake, …)
Documents
- D1. [DONE] GitHub project
- D2. [DONE] User documentation
- D3. Educational content
- D4. Academic papers
- D5. [DONE] Social network disseminations (e.g. videos)
Initially needed information
- Close-up images of hand prototype
- Details about input signals and communication
- Mapping between input signals and angles
- Mapping between collision and feedback signals
Other Ideas
Grip Lock
A real hand holding an object can be controlled by two group of muscles. The hand muscles control the gripping, and the arm muscles can move the whole arm. These two groups of muscles work independently, so a person cam move the arm while holding an object.
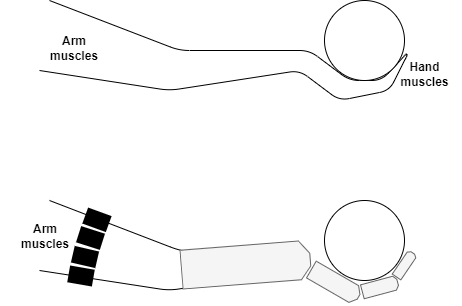
A prosthetic hand is controlled by arm muscles only, so it is impossible for a person to both hold an object and move the arm, because arm movement might be interpreted as some hand gesture and the object might be dropped.
The grip lock concept resolves this problem by switching the target of arm muscles.
-
When the grip is locked, the prosthetic hand has a firm grip that does not change when arm muscles are used. So, arm muscles controls the arm.
-
When the grip is unlocked, the proshthetic hand is controlled by the arm muscles.
Thus the process of grabbing and moving an object is:
- Lock the grip, and move the arm so that it reaches the object
- Unlock the grip and move the prosthetic finger to grab the object
- Lock the grid to keep the object grabbed, and move the arm
- Unlock the grip to release the object
To implement the grip lock functionality, it is required to have a special lock/unlock signal generate by either the arm muscles, or by other means.
Grasp taxonomy
There is a taxonomy of gestures where more gestures are being described. It would be nice if all these gestures are also supported. Currently some of the gestures are impossible to the virtual hand, because the thumb need additional rotation axis at its base to allow abducted and adducted position.
A few pointers:
-
Thomas Feix, Javier Romero, Heinz-Bodo Schmiedmayer, Aaron M. Dollar, and Danica Kragic (2016) The GRASP Taxonomy of Human Grasp Types, IEEE TRANSACTIONS ON HUMAN-MACHINE SYSTEMS, VOL. 46, NO. 1, FEBRUARY 2016, pp. 66-77
-
Mark Cutkosky (1989) On Grasp Choice, Grasp Models, and the Design of Hands for Manufacturing Tasks, IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 5, NO. 3. JUNE 1989, pp. 269-279
-
Hyeonjun Park, Donghan Kim (2020) An open-source anthropomorphic robot hand system: HRI hand, HardwareX, Volume 7, April 2020, e00100
-
Erika Nathalia Gama Melo, Oscar Fernando Aviles Sanchez, Darlo Amaya Hurtado (2014) Anthropomorphic robotic hands: a review Ingeniería y Desarrollo, vol.32, no.2, Barranquilla July/Dec. 2014
Shoulder control
Most smartphones have sufficiently precise local motion sensors via gyroscope. A smartphone attached to the shoulder can be used as motion sensor for transradial, transhumeral and shoulder disarticulation amputees. For forequarter amputees the smartphone can be attached to the other arm.
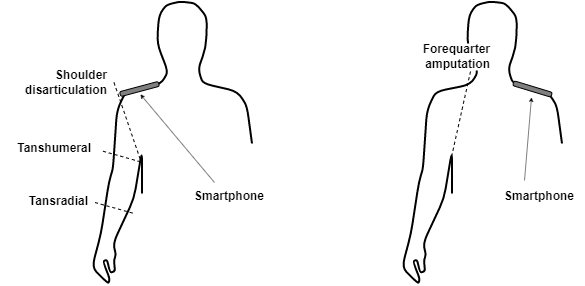
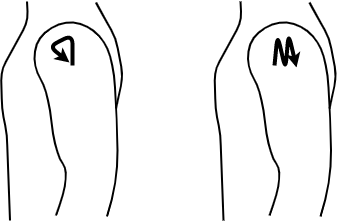
This idea is based on the observation that the shoulder has at least two degrees of freedom and people have better control over its motions (compared to capturing signals via surface electromyography). Additionally, shoulder control is more consistent across different peopls, and it allows more complex pattern motions, compareable to writing simple characters.
Other advatnages of this approach is the availability of technology – it is assumed that most people already have smartphones, no there is no need to purchase new hardware. Attachment to the shoulder could be via a velcro surface, a shoulder belt or just a poket on the top or front of the shoulder.
Finally, the smartphone CPU can be used to process the shoulder motion and to control the prosthetic hand.
References
Grasp reference
A Sketchpad model of a human head making the sign language gestures for all letters and digits is available at Male Hands Alphabet Numbers. It can be used as a reference so that to verify whether all these gestures can be made with the virtual hand.

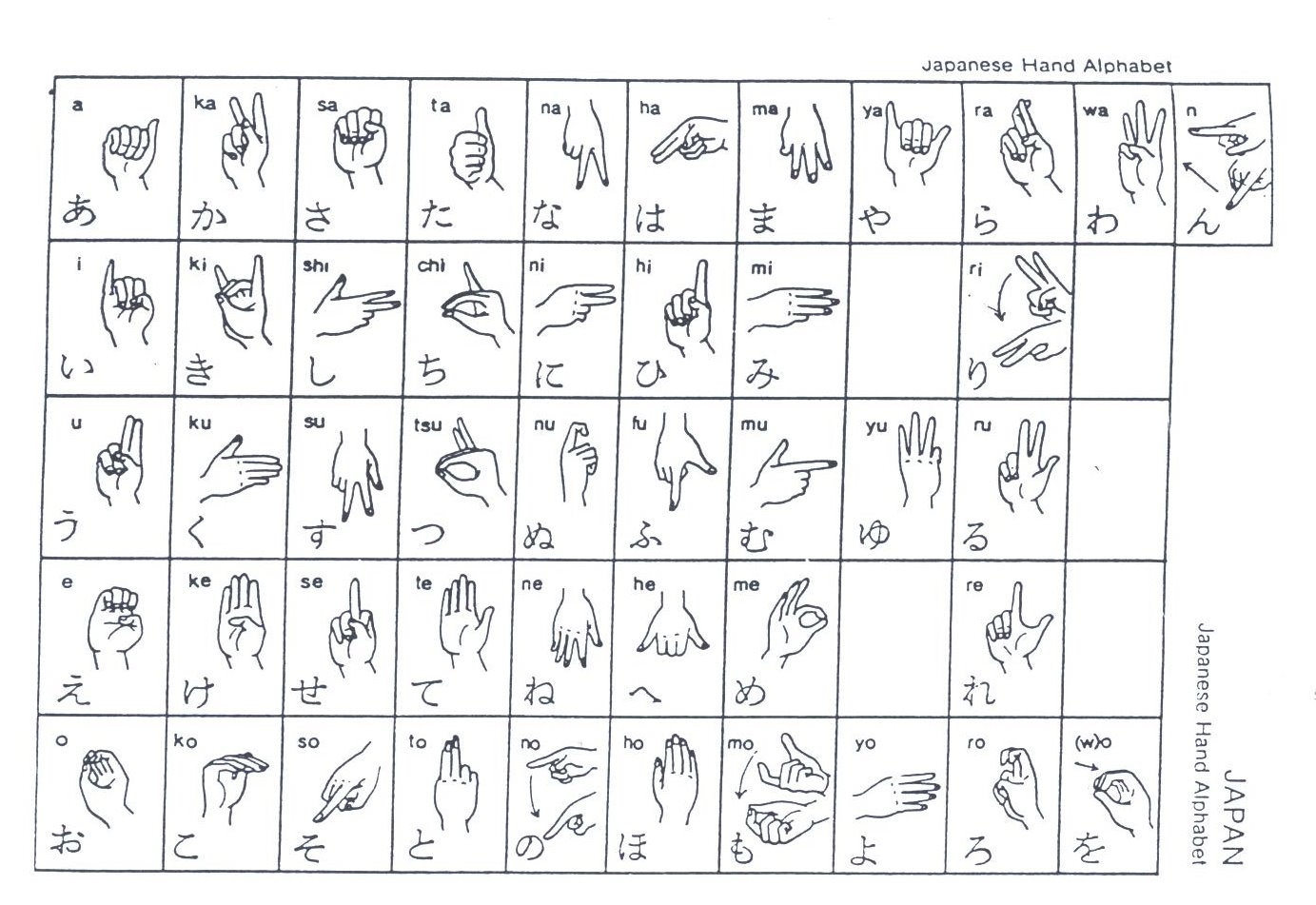
Additionally, The Japanese Sigh Language has a larger set of fingerspelling gestures, shown in Practice JSL Fingerspelling or in Japanese manual syllabary
Detailed hand
A Sketchpad model is a detailed 3D model of robotic/prosthetic hand. The license is CC-BY, so it is possible to download it and test whether Virtual Prosthetics can use this model. The model is jointed hands BJD.
