disfigure
![]()
Disfigure: User Guide
Figures (creating · anatomy · posture)
Motions (figure · animation · generators )
Customization (accessories · textures · dressing)
Using (world · positions · CDN · local web server · nodes)
Figures
Disfigure is a simple library for animating human figures.
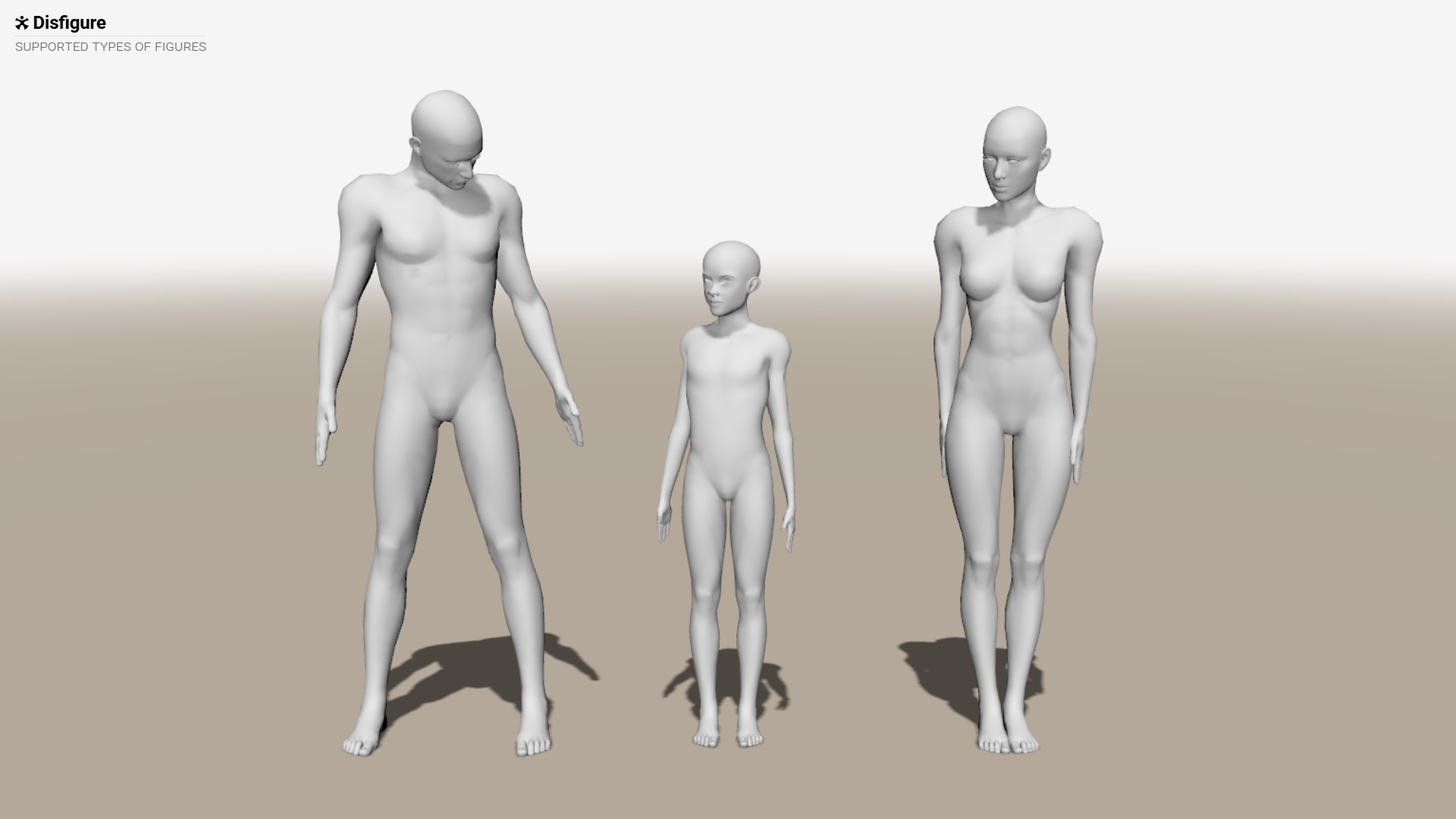
Creating a figure
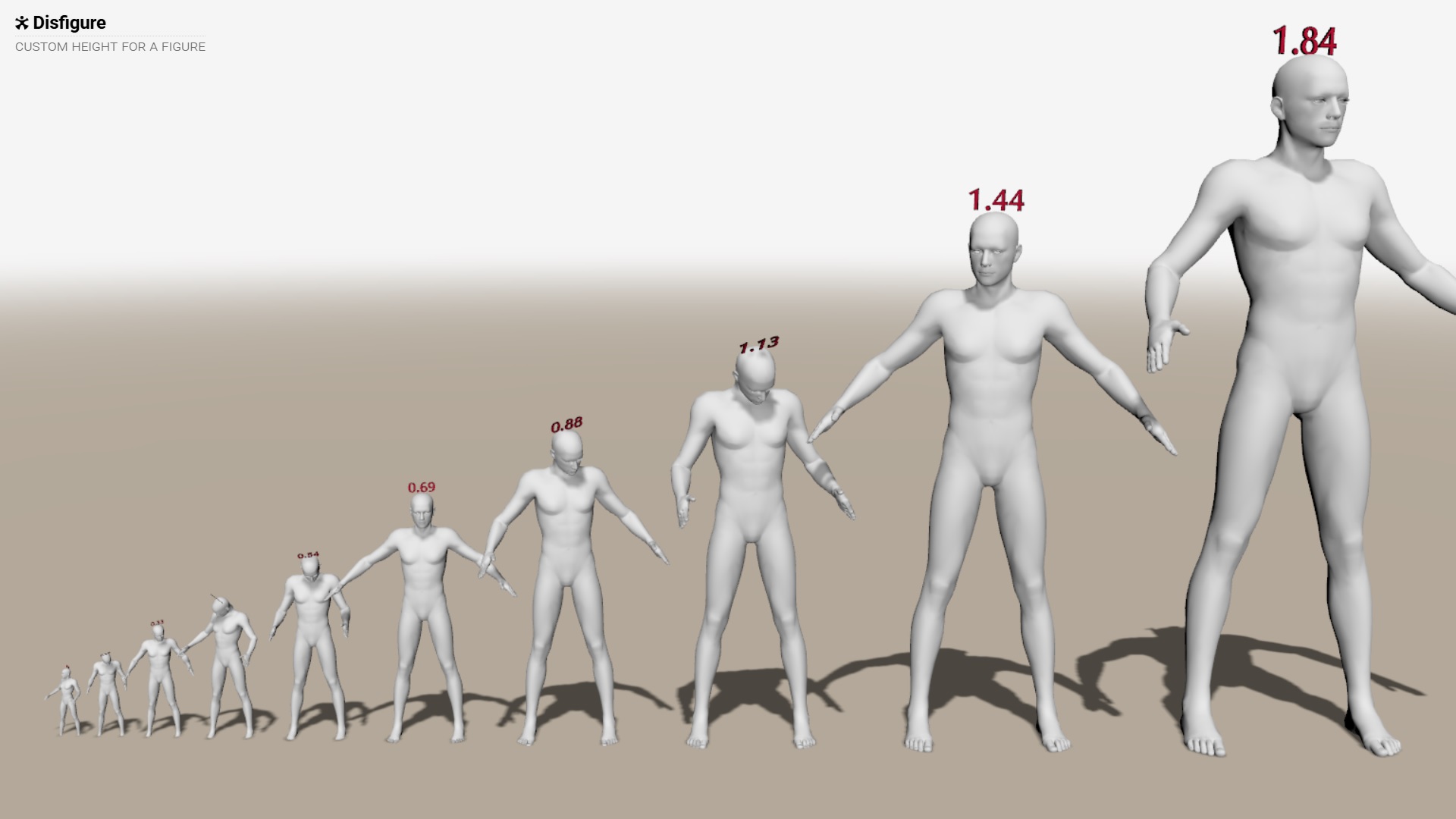
A figure is created as an instance of Man, Woman and Child with an optional
parameter for height in meters. The default heights are 1.80 for men, 1.70 for
women and 1.35 for children.
var man = new Man( );
var woman = new Woman( 1.75 );
var child = new Child( 1 );
Live examples: figure types and custom heights:
Anatomy of a figure
All figures have the same body structure with names for each body part that can be manipulated.
The central body parts are torso, head, chest and waist. Arms are arm,
elbow,forearm and wrist. Legs are leg, thigh, knee, shin, ankle
and foot. Hand fingers are thumb, index, middle, ring and pinky.
The names of symmetrical body parts have prefixes l_ for left
and r_ for right. Leftness and rightness is always in respect to the figure
itself. Fingers phalanges are named after the fingers but with suffixes _mid
and _tip (note: thumbs have no middle phalanges).
figure.head // head
figure.r_knee // knee of right leg
figure.l_index // index finger of left hand
figure.l_index_tip // tip phalange of index finger of left hand
Live examples: body parts and fingers with phalanges:
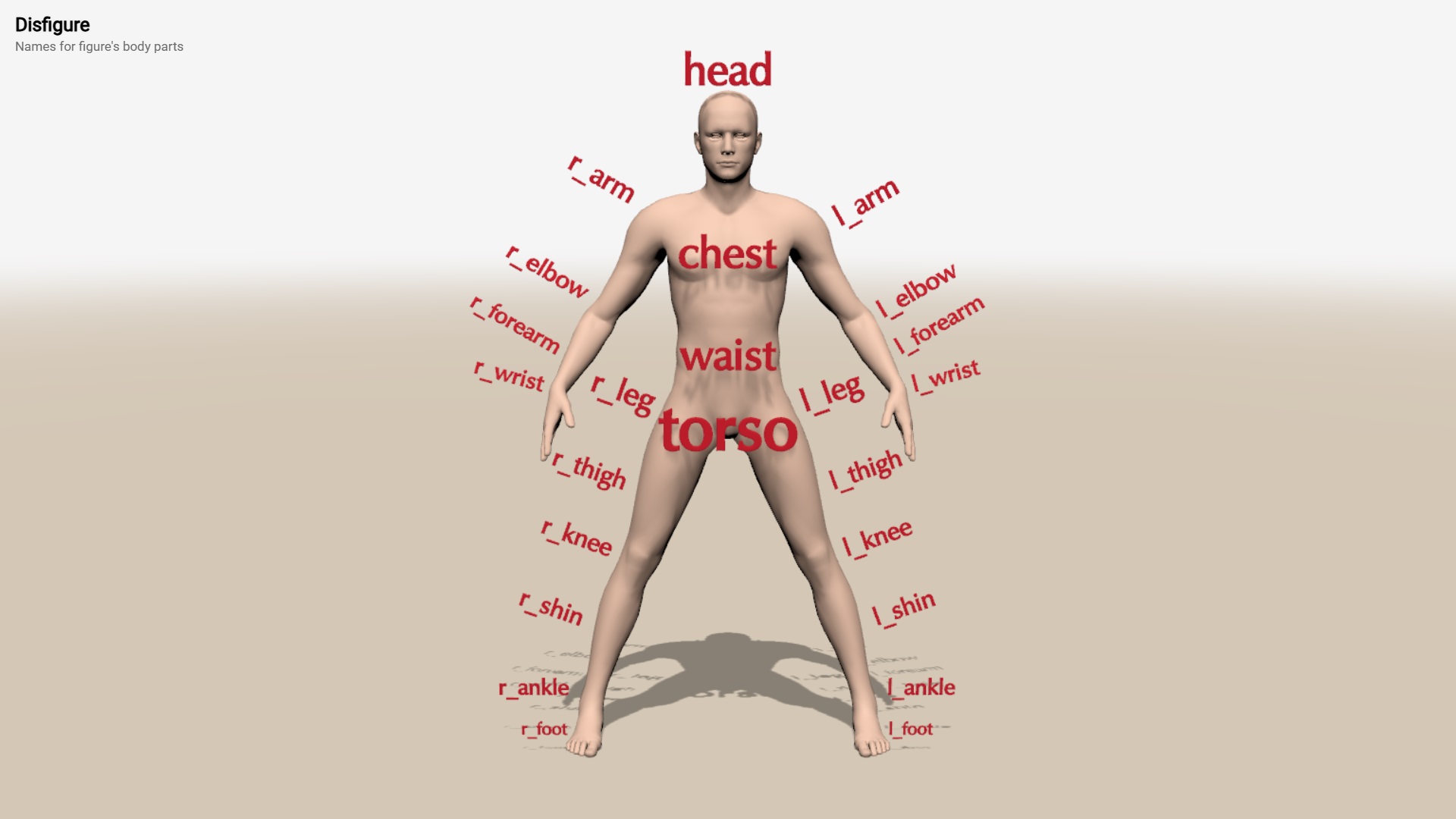
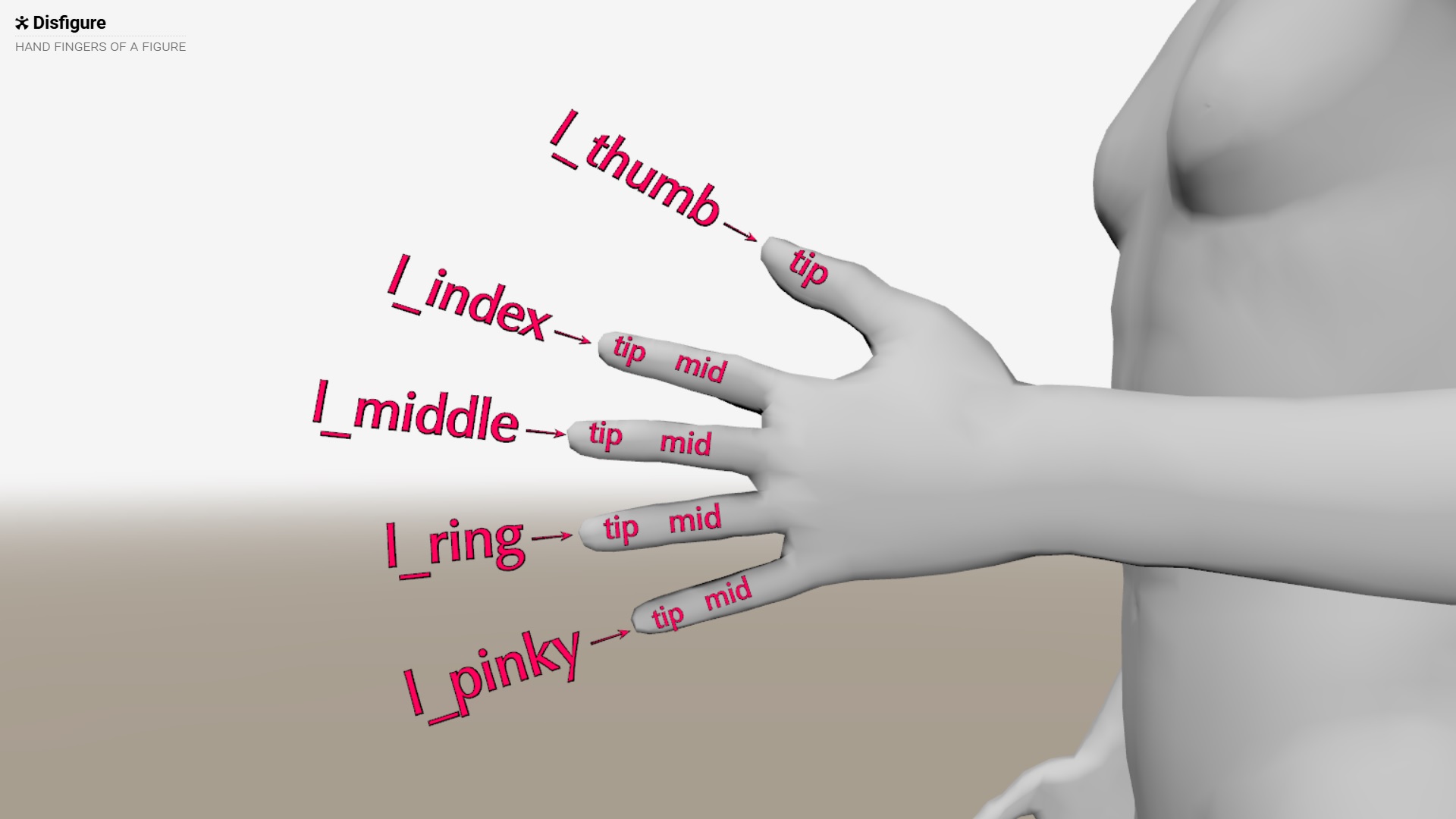
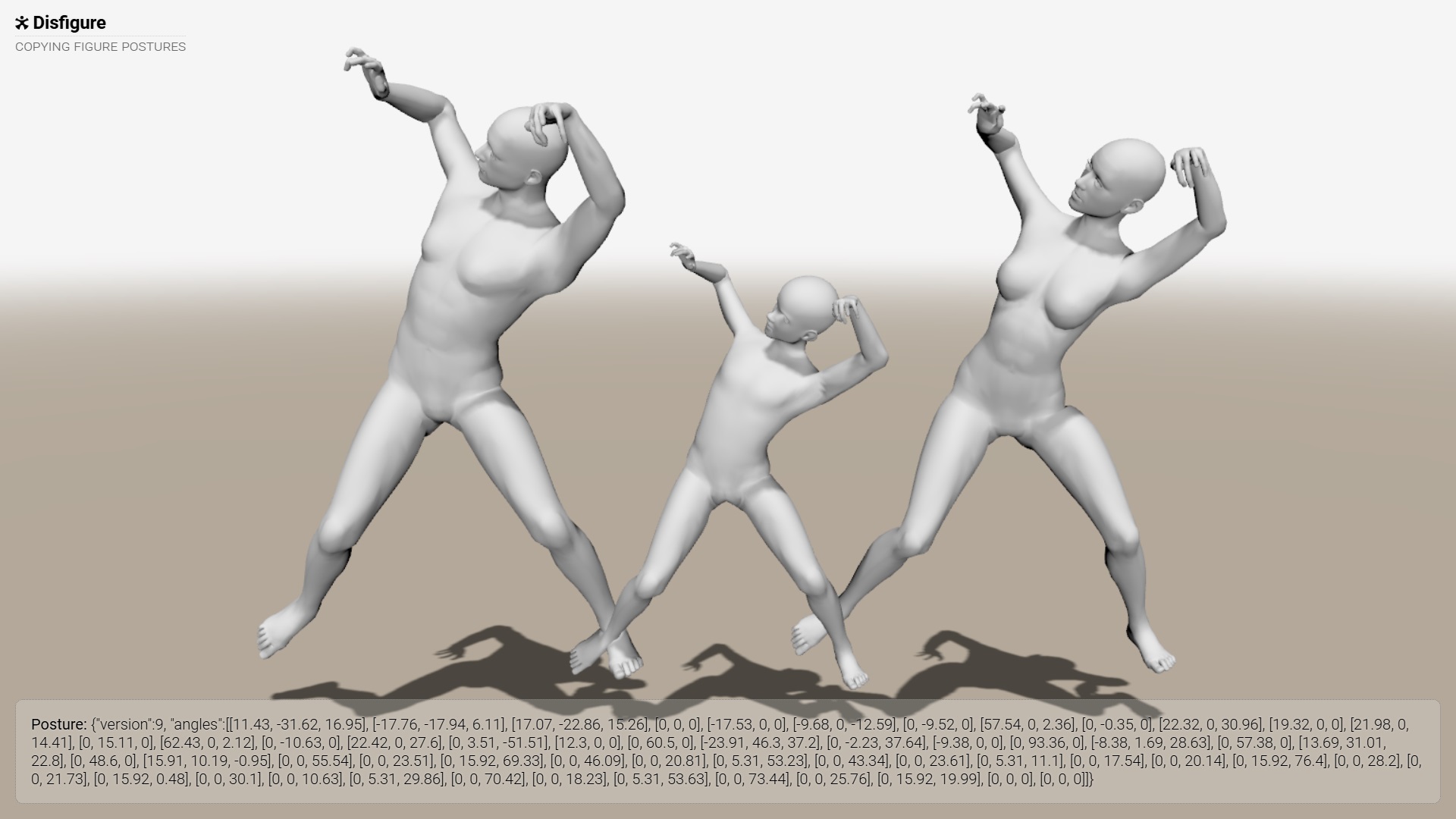
Figure posture
The posture property of a figure describes the rotations of all body parts.
It contains version number of an array of rotation angles. The posture property
can be used to push a posture to a figure. A read-only property postureString retrieves the posture as a string.
figure.posture = {version:9, angles:[[-15,44,10],[5,82,-24],...]};
figure.posture = anotherFigure.posture;
var str = figure.postureString;
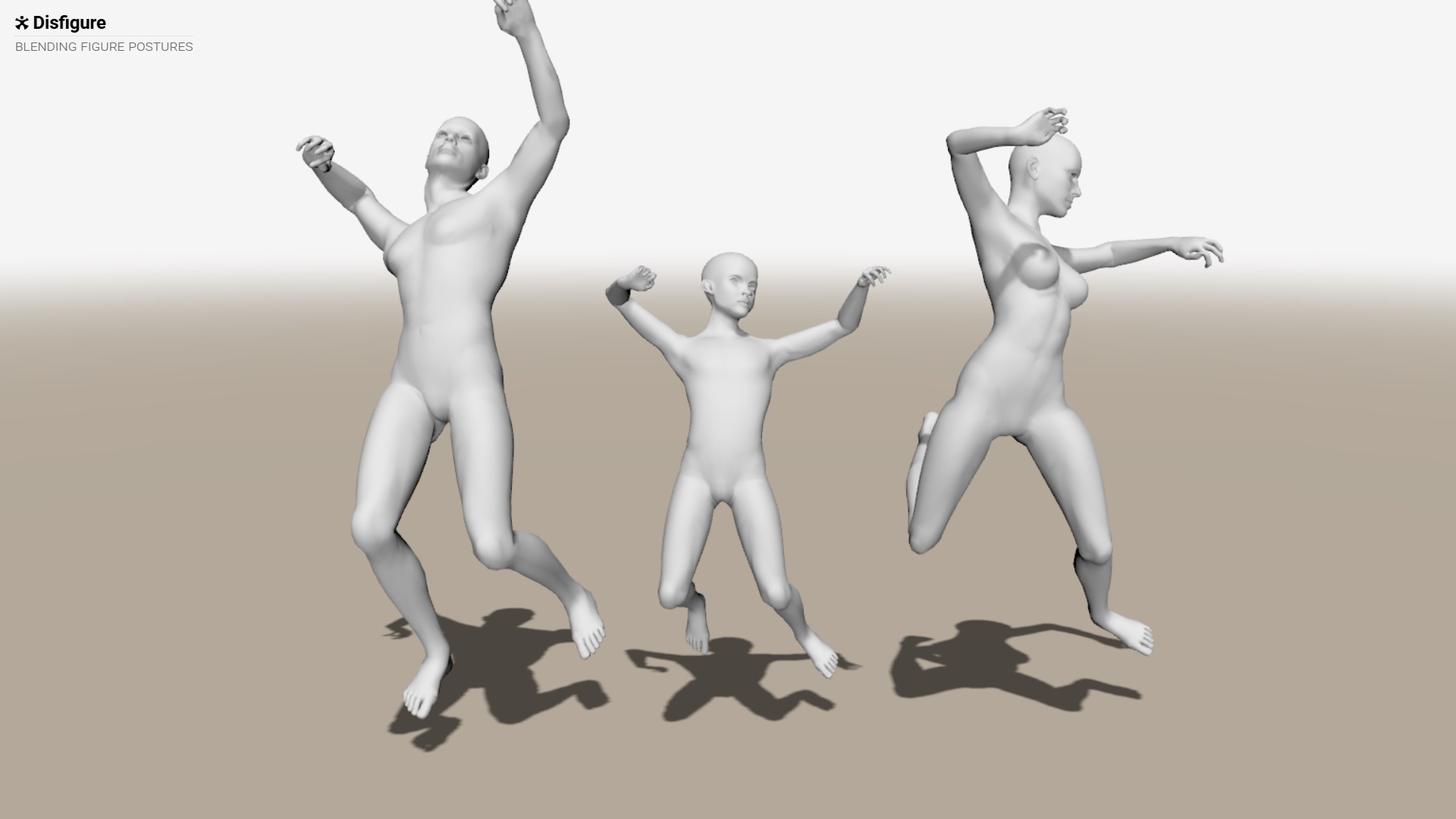
A posture could be defined as a blend of other postures. Method blend mixes
two postures with a blending coefficient. When the coefficient is 0 the result
is the first posture, when it is 1 the result is the second and when it is between
0 and 1 the result is a posture between both postures.
figure.blend( initialPosture, finalPosture, 0.5 );
Live examples: posture data and posture blending:
Motions
The motion of a figure is done by manipulating properties of the figure or its body parts.
Figure position
The position of the figure within the 3D is controlled by its
.position property with subproperties .x, .y and .z. Technically, the
position is Vector3 object.
figure.position.set( 1, 0, 0.5 );
figure.position.y = -0.1;
Live examples: figure position and figure motion:
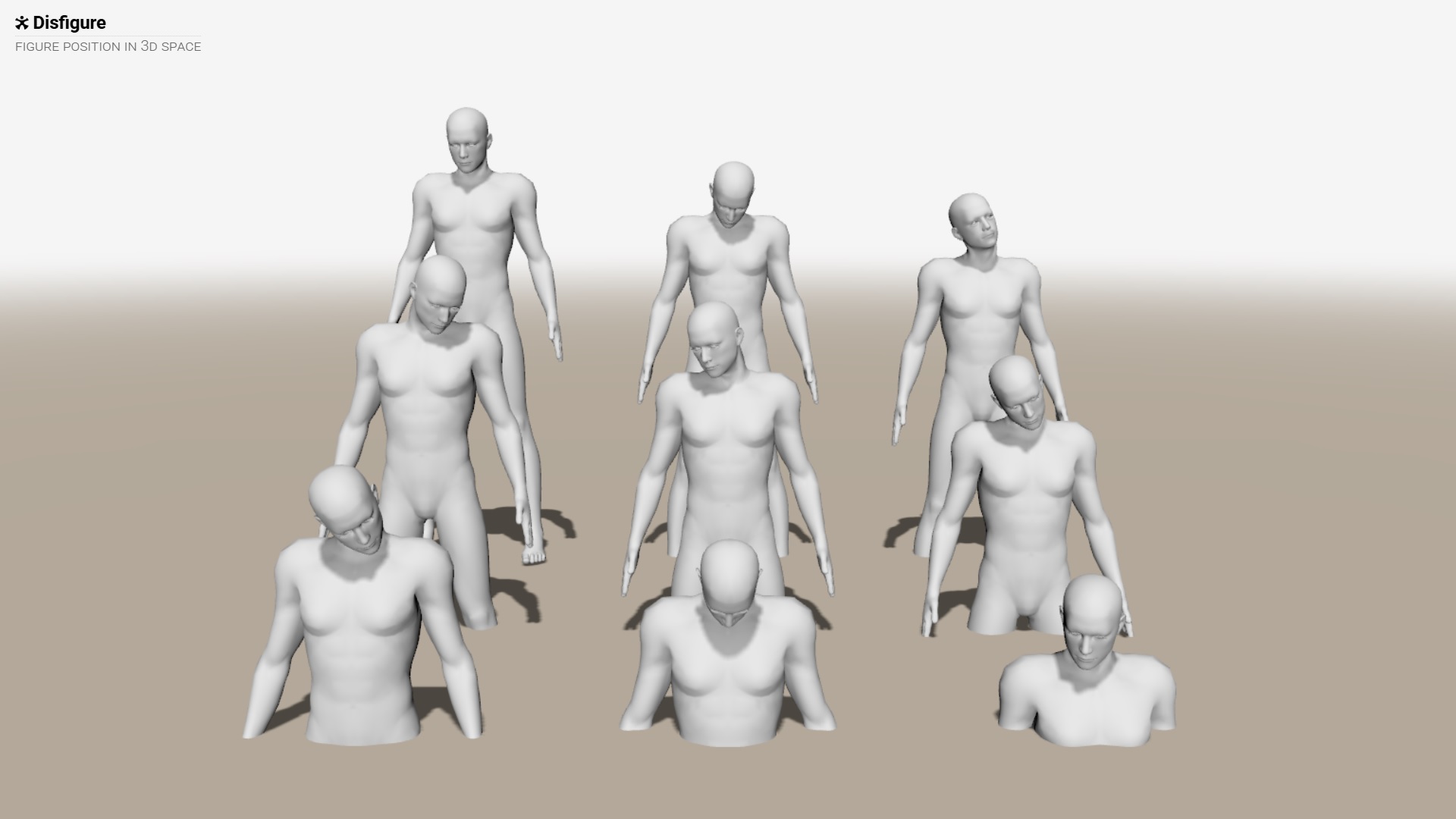
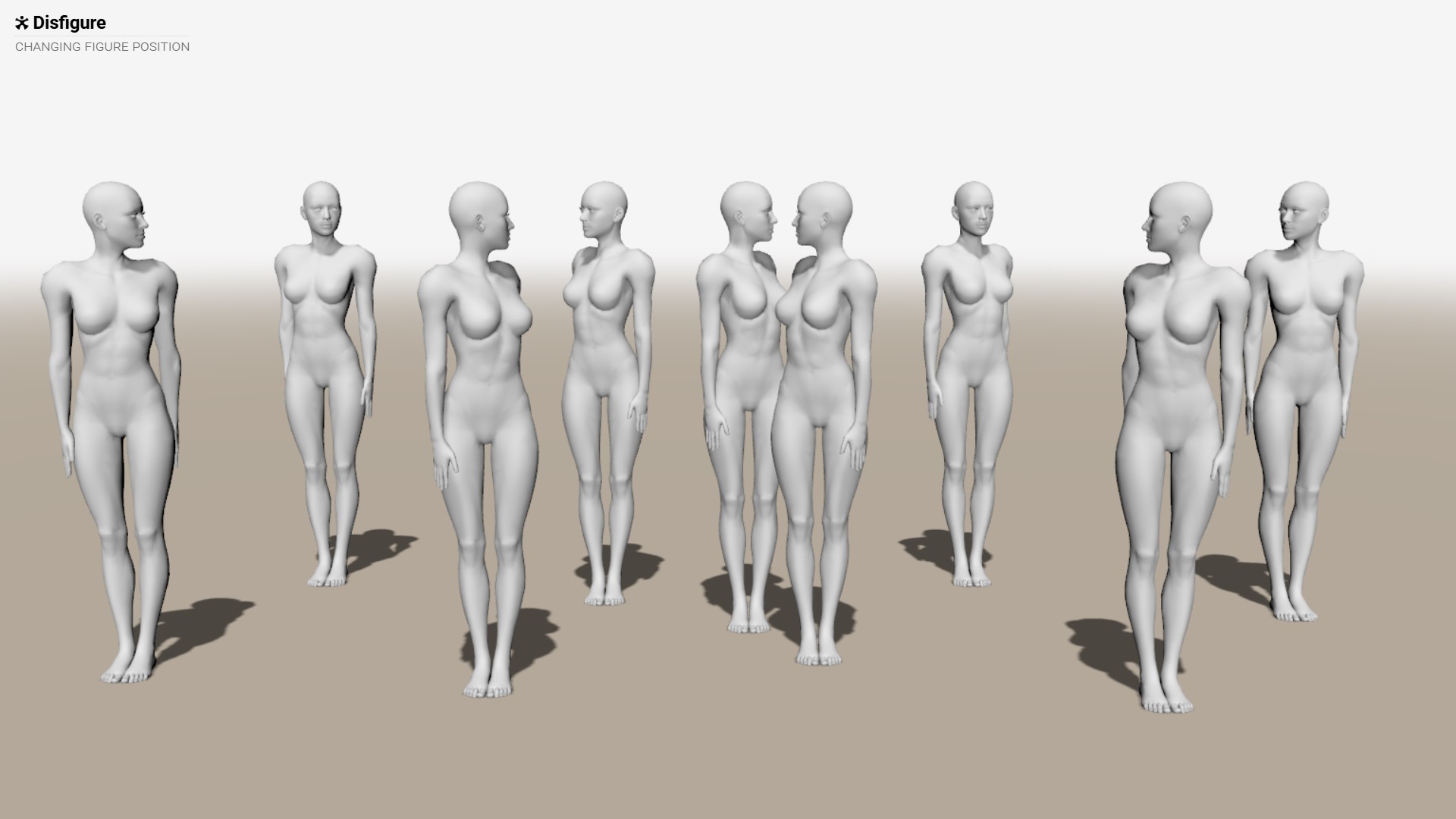
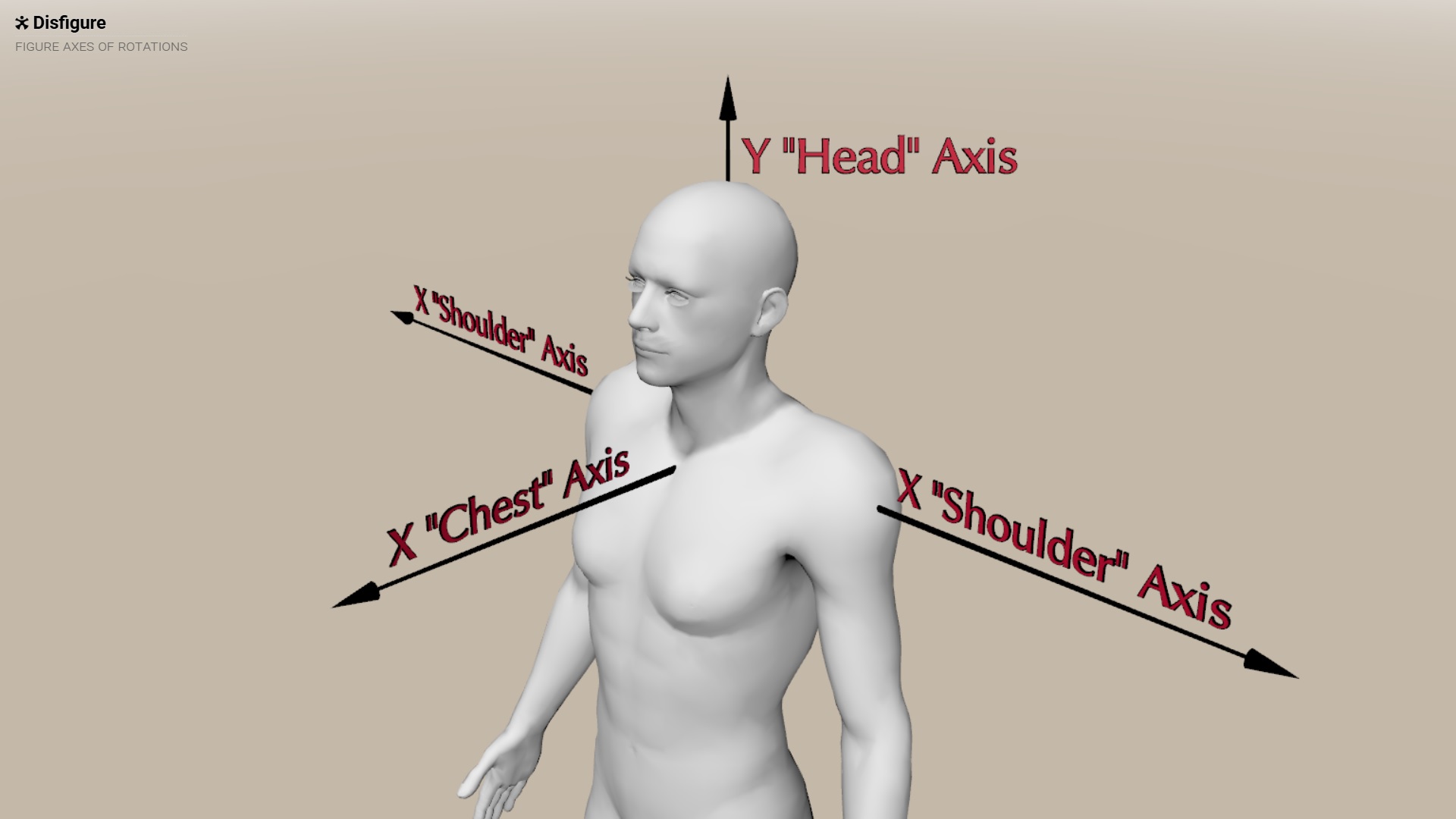
Figure motion
Each figure has three main axes:
- X axis: (aka shoulder axis) horizontal left-right direction
- Y axis: (aka head axis) vertical top-bottom direction
- Z axis: (aka chest axis) horizontal front-back direction
Body parts have properties .x, .y and .z which define the rotation around
the corresponding axes. Angles of rotations are in degrees.
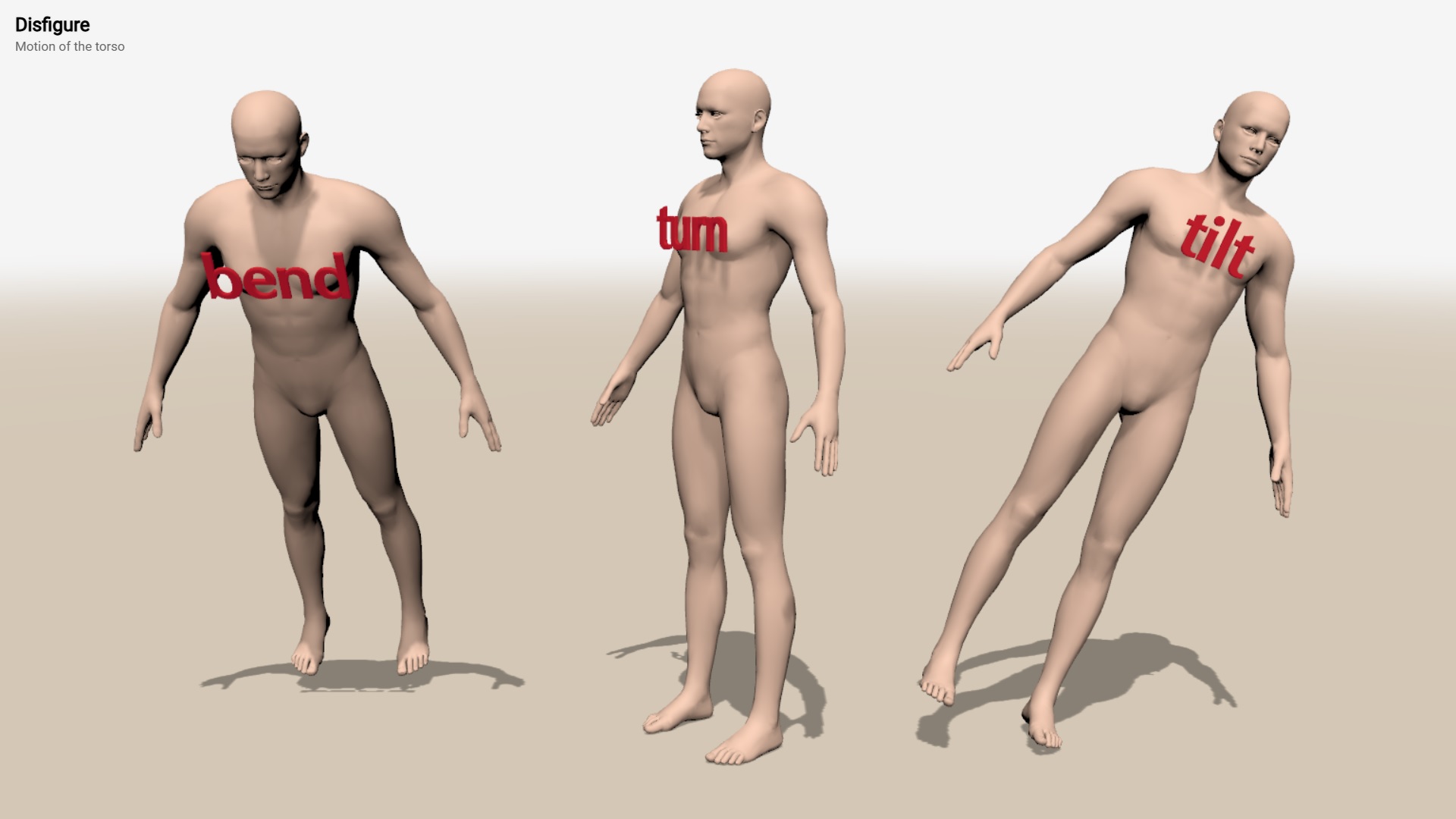
Central body
The central body contains body parts in the middle of the figure – head,
chest, waist and the torso. They have no left and right variants. The motions of central body parts follow the same axes of rotations.
- positive X direction is bending forward, negative is backward
- positive Y direction is turning left, negative is right
- positive Z direction is tilting left, negitive is right
figure.head.x = 40;
figure.chest.z = 10;
figure.waist.z = -30;
Live examples: axes of rotations and motion of head, chest and waist:
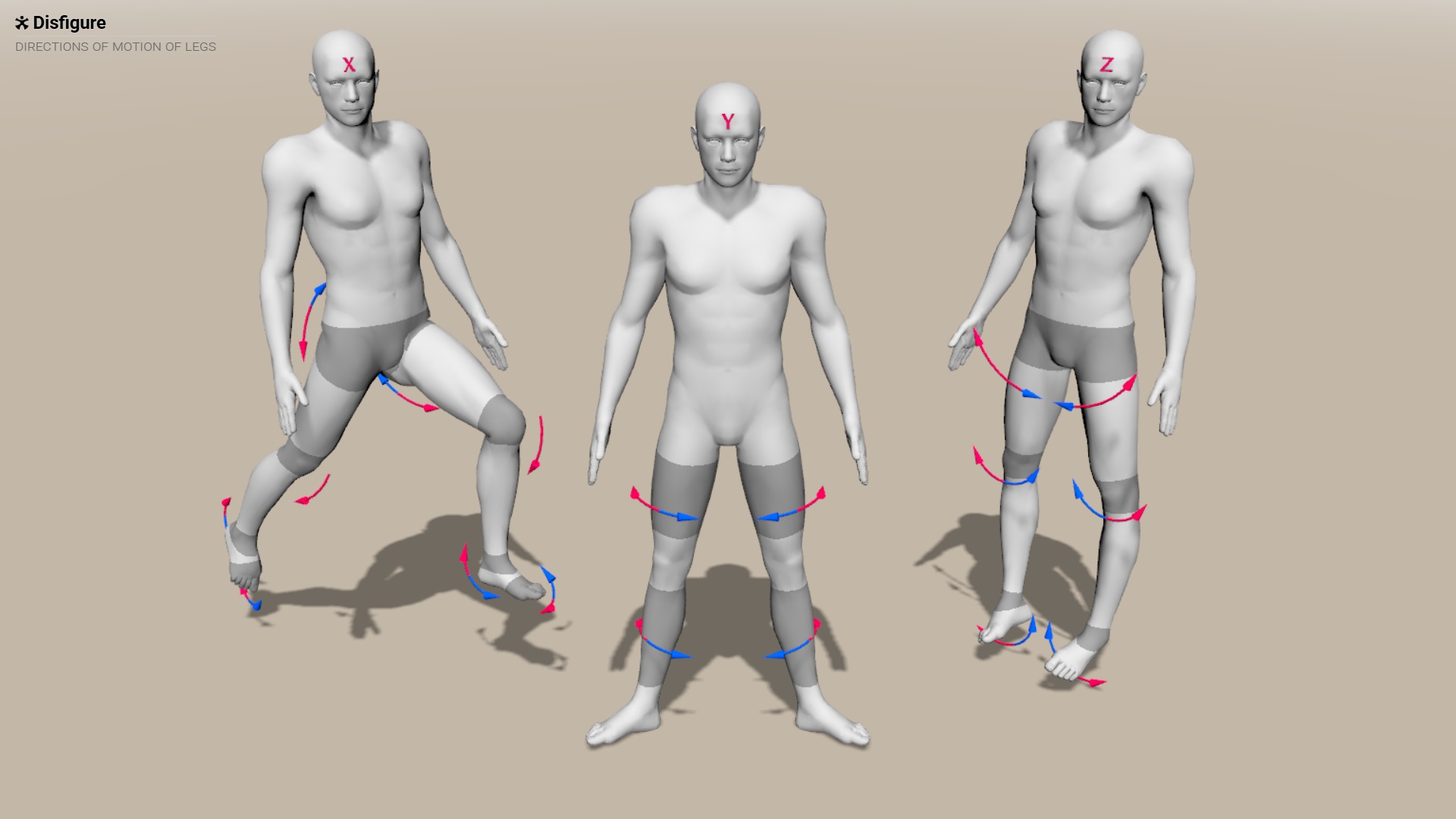
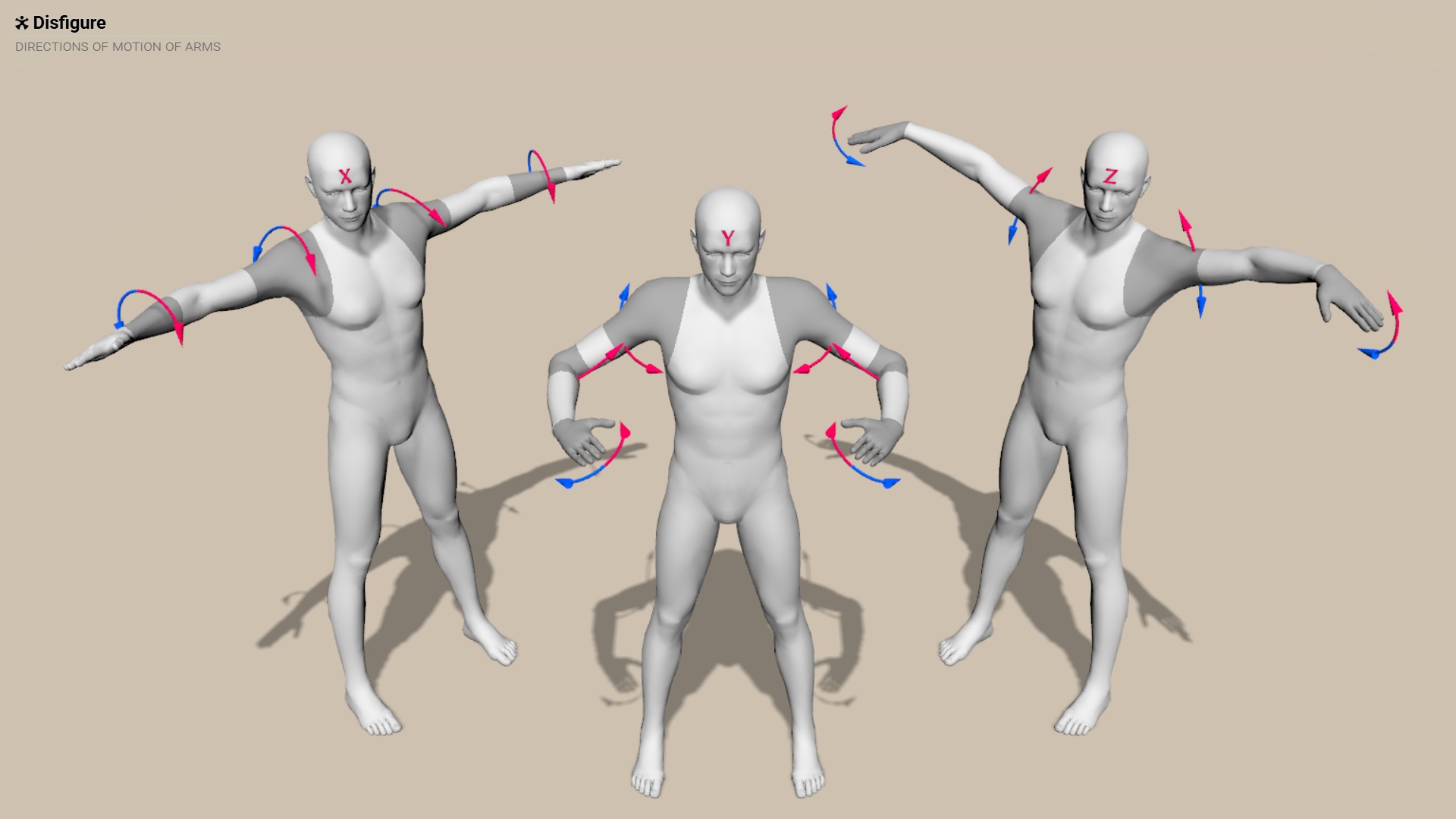
Legs and arms
A leg is made of leg, thigh, knee, shin, ankle and foot. An arm is
made of arm, elbow, forearm and wrist. These body parts are left and
right and the rotation around Y and Z axes is symmetrical and horizontally
flipped as if mirrored. Note that some motions might look counterintuitive when
two or three rotation are applied on the same body part. This is due to rotations
being non-commutative.
figure.l_knee.x = 40;
figure.r_ankle.x = 10;
figure.l_elbow.y = 45;
figure.r_wrist.z = -20;
Live examples: motion of legs and motion of arms:
Fingers
Only hand fingers are presented as individual body parts. Fingers are thumb,
index, middle, ring and pinky. They are always used with prefixes l_
or r_. Fingers have phalanges which are identified with sufix _mid (for middle)
and _tip (for end) phalange. Note that the thumb has no middle phalange.
figure.l_thumb.x = 20;
figure.r_index.z = 45;
figure.r_index_mid.z = 30;
figure.r_index_tip.z = 15;
Live examples: motion of fingers and motion of phalanges:
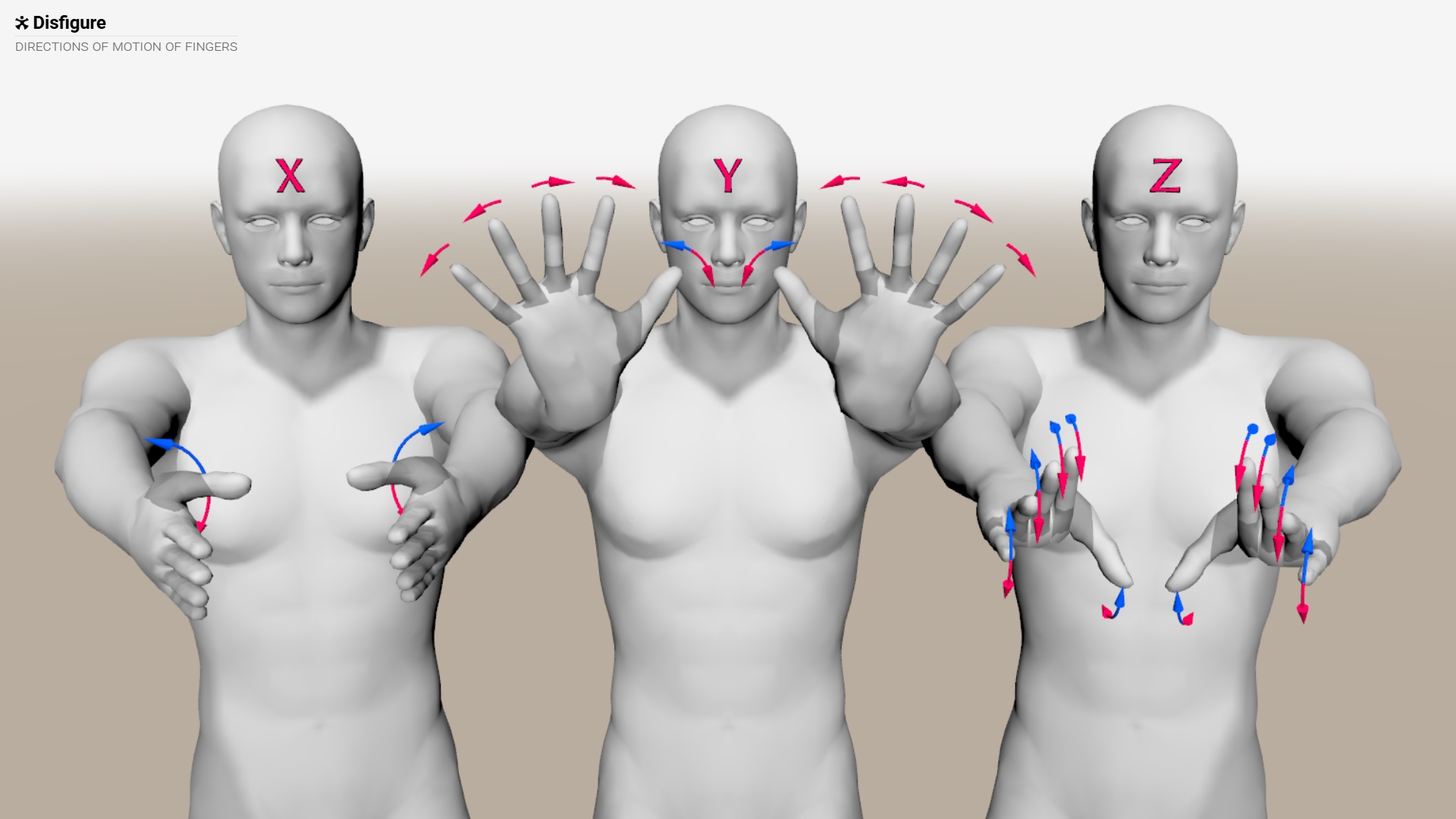
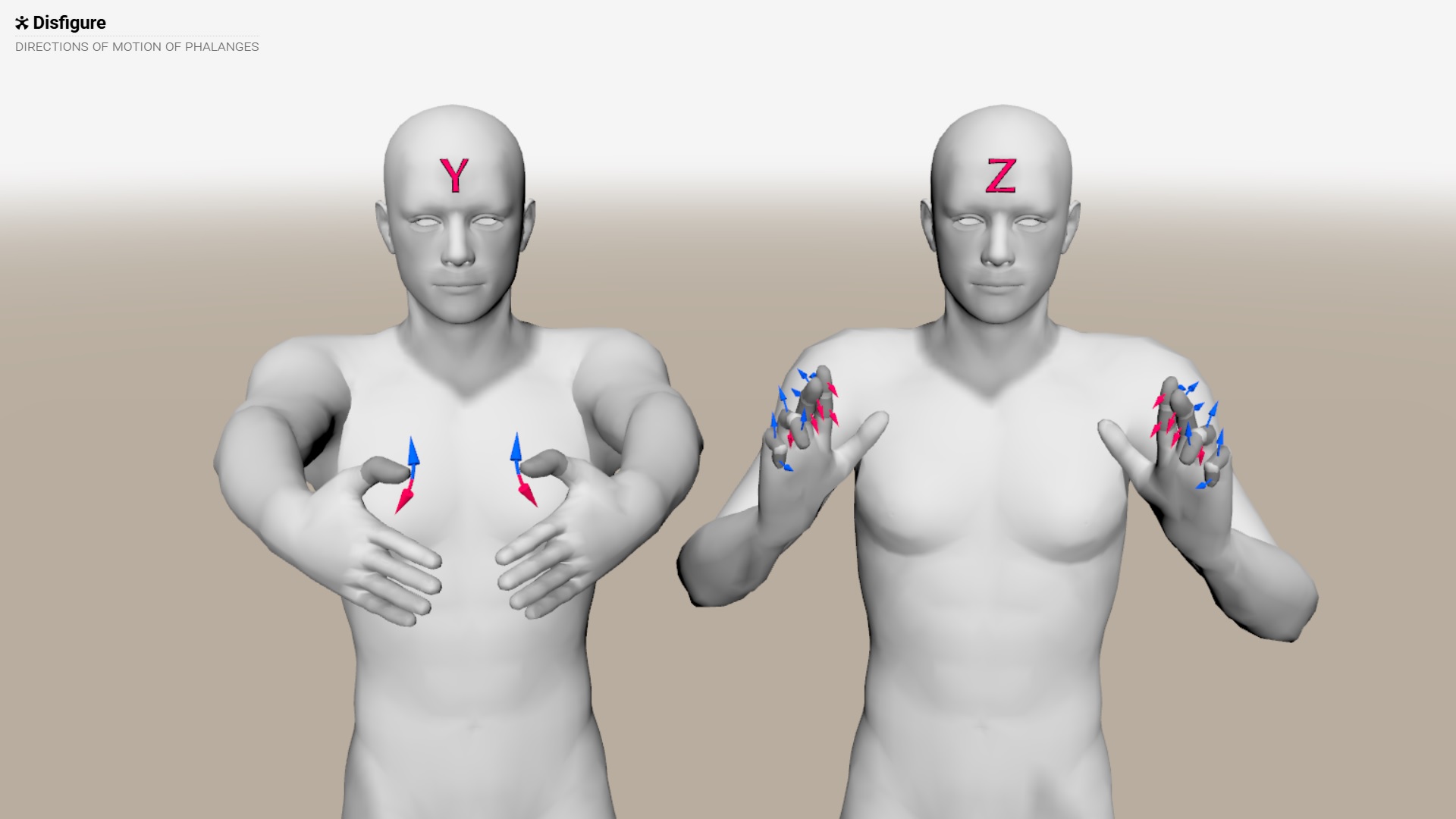
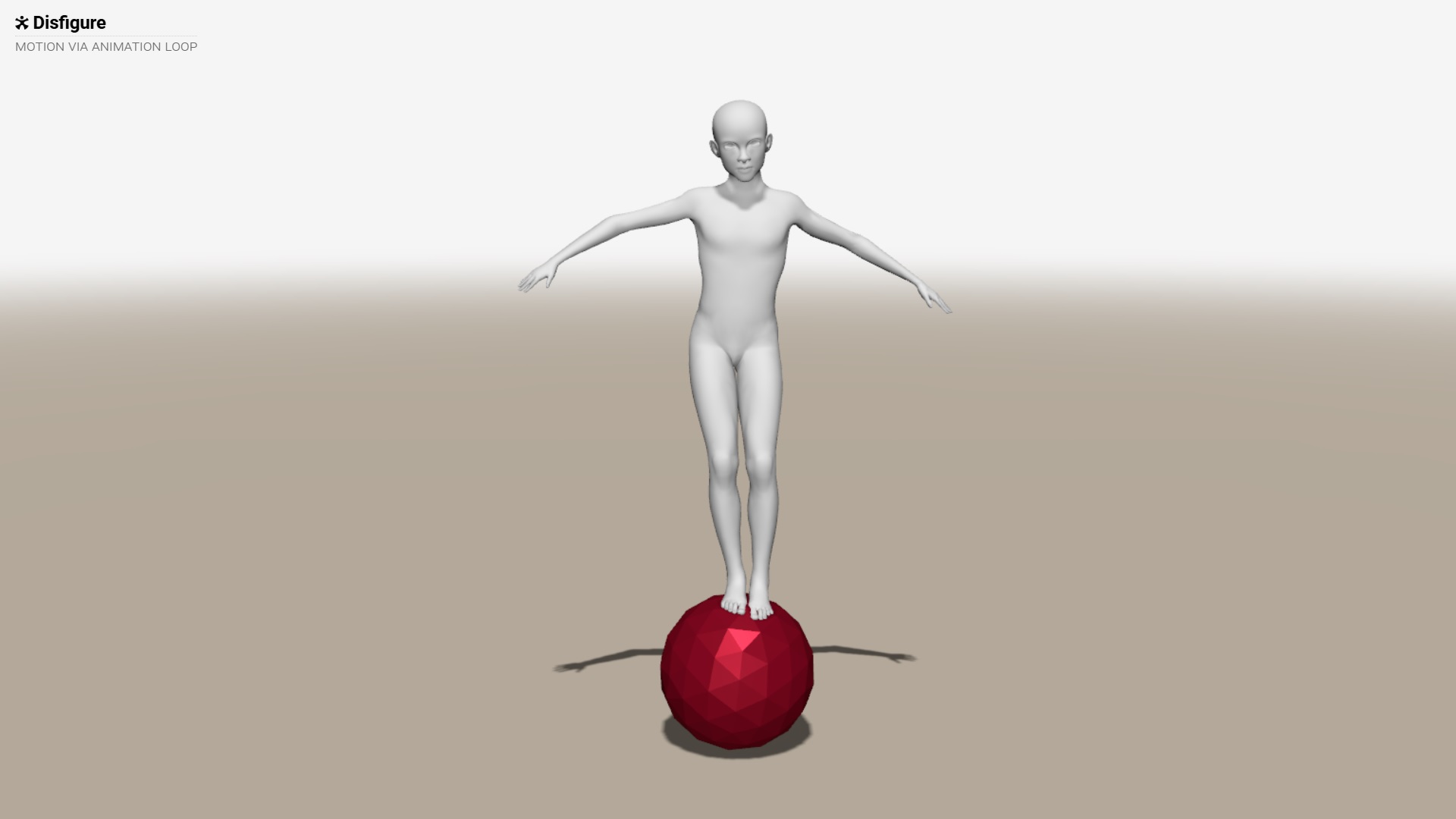
Figure animation
A default Disfigure world manages figure animation in two ways – via
animation loop or animation event. The function setAnimationLoop registers
a user-defined function that is called automatically each frame. The function
accepts a parameter time with the current time in milliseconds.
setAnimationLoop( animate );
function animate( time ) {
// executed once per frame
}
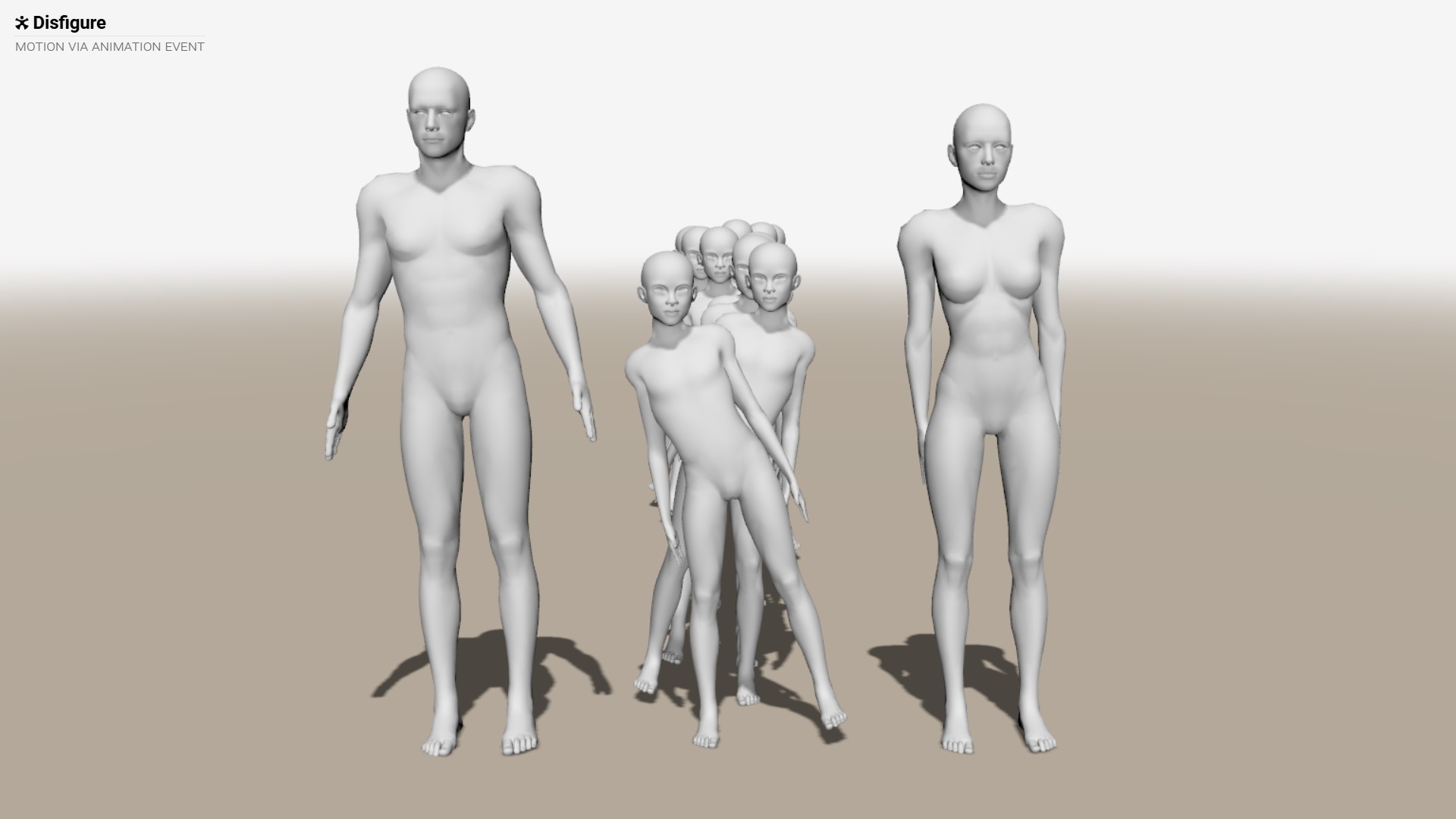
Alternatively the window object may listen to animate events that are
generated every frame with property event.time holds the current time in
milliseconds. The animate event is also sent to individual figures and in this
case the figure itself is in event.target.
window.addEventListener( 'animate', animate );
function animate ( event ) {
var time = event.time;
// executed once per frame
}
figure.addEventListener( 'animate', animate );
function animate ( event ) {
var time = event.time,
figure = event.target;
// executed once per frame
}
Live examples: animation loop and animation event:
Number generators
Disfiure provide three number generators – these are functions that
generate sequences of numbers used in animations. The random generator creates
uniformly distributed random numbers within interval. The regular generator
creates oscillation of values within interval. The chaotic generator combines
randomness and smoothness – it creates smoothe sequence of numbers that
gradually oscillate between randomly selected values in interval.
Random generator needs only interval, while regular and chaotic generators need time, offset and interval.
figure1.head.y = random( -30, 30 );
figure2.head.y = regular( time, 0, -30, 30 );
figure3.head.y = chaotic( time, 0, -30, 30 );
Live examples: generators graphs and generators animations:
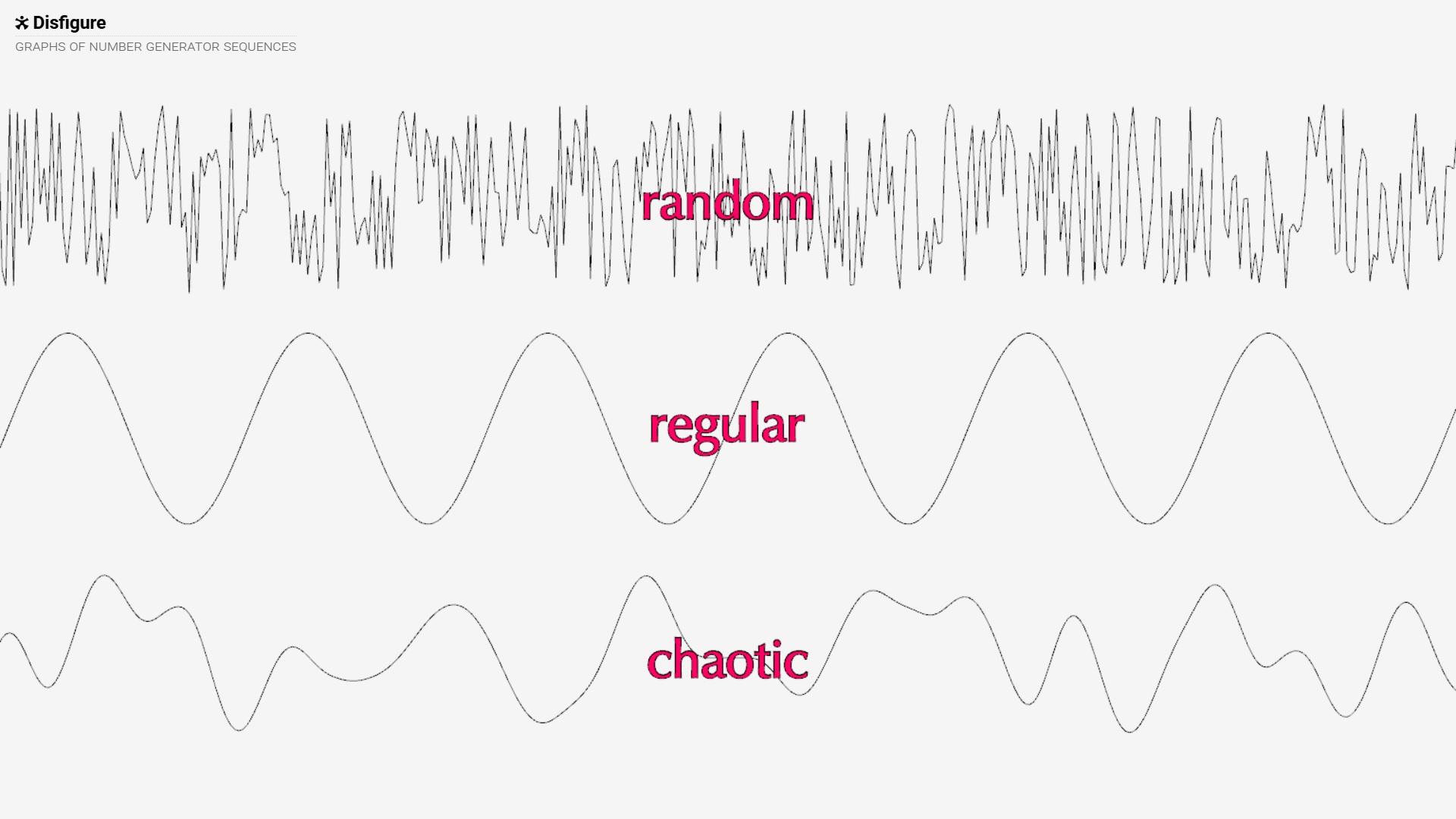
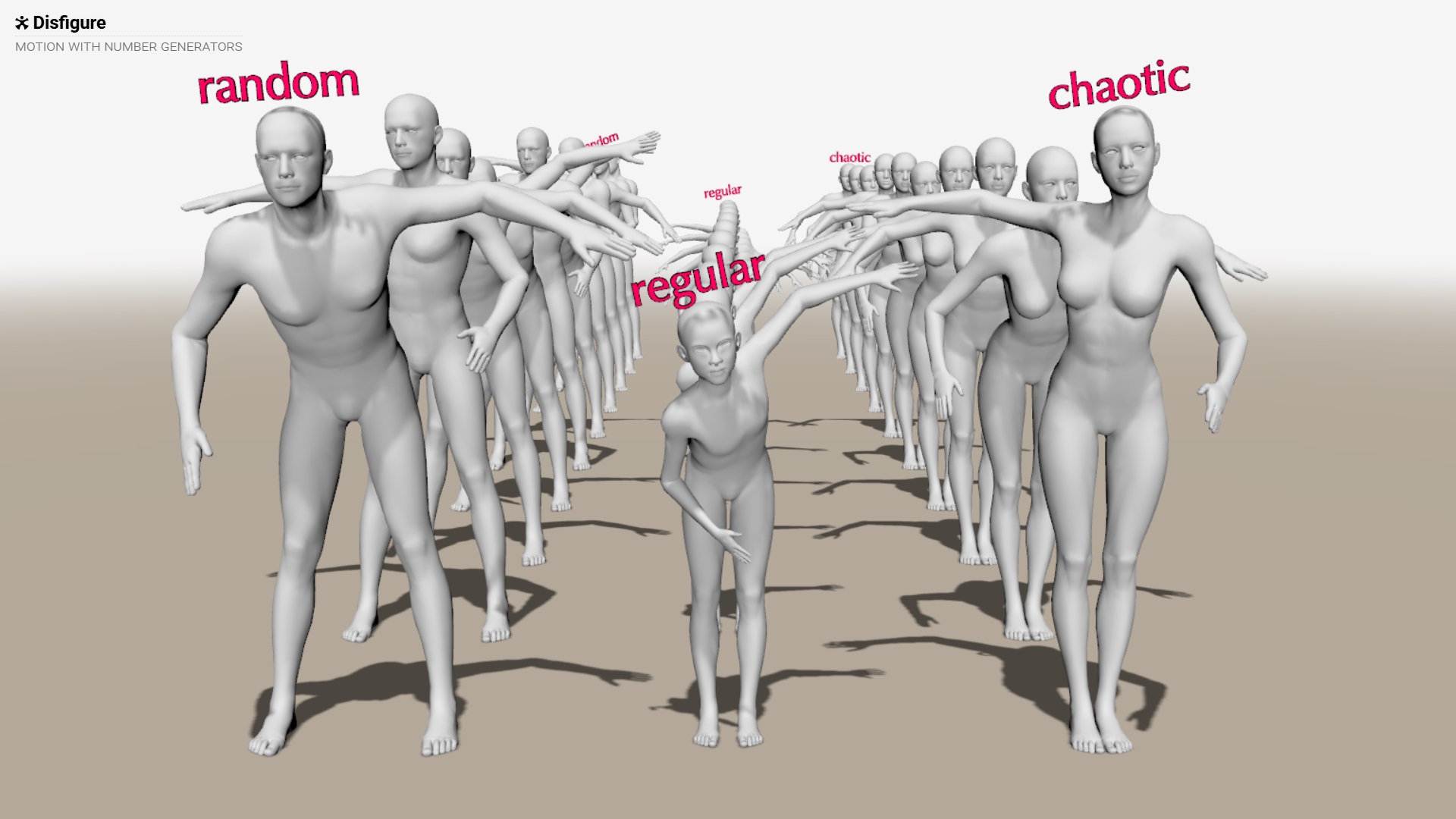
Figure customization
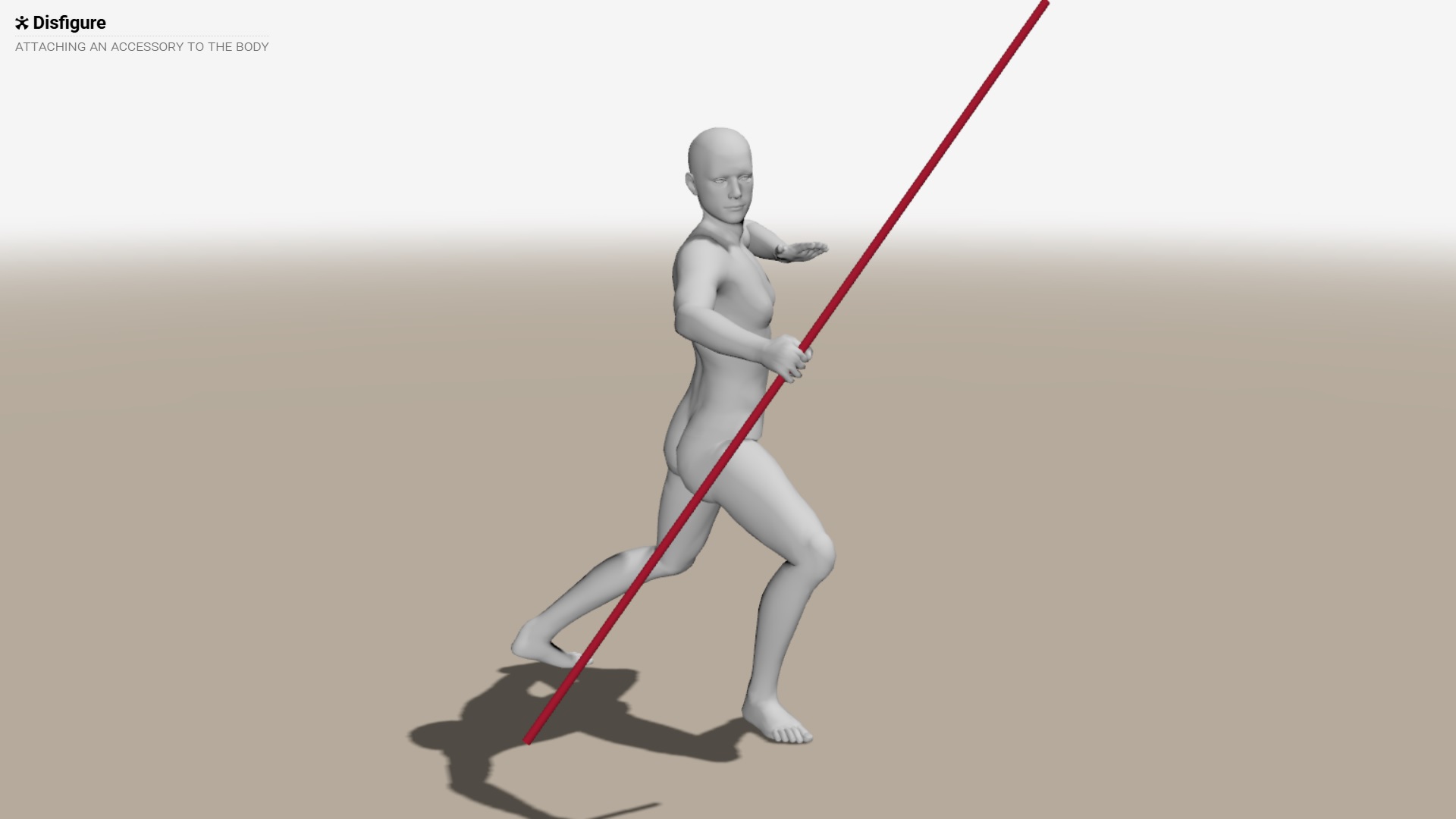
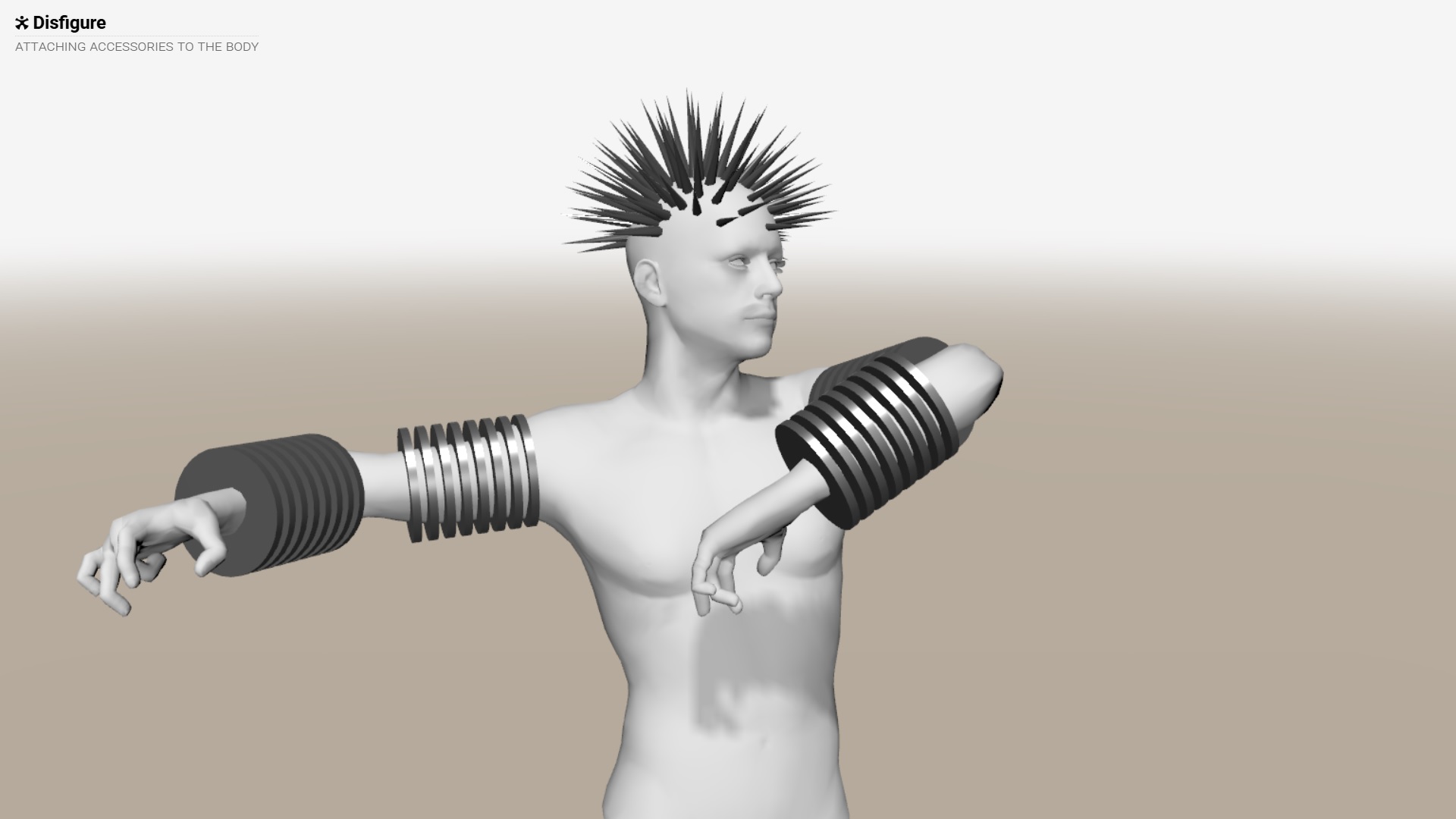
Accessories
Accessories are Three.js objects attached to a specific body part. They do not deform, but move as if attached to the body. The accessory own position and rotation properties are in respect to the origin of the hosting body part.
figure.l_arm.attach(object);
Live examples: attach one accessory and many acccessories:
TSL textures
Disfigure is compatible with most TSL Textures
– real-time textures generated via TSL. To use a TSL Texture it must be
imported as well as all Three.js classex that are used. Textures are provided as
functions. The result of these functions are to be assigned to material nodes,
usually .colorNode.
import * as Three from "three";
import { camouflage } from "https://cdn.jsdelivr.net/npm/tsl-textures@3.0.1/dist/tsl-textures.min.js";
:
figure.material.colorNode = camouflage ( {
scale: 3,
colorA: new Three.Color(12762792),
colorB: new Three.Color(10258782),
colorC: new Three.Color(9610101),
colorD: new Three.Color(7435617),
} );
Live examples: single texture and multiple textures:

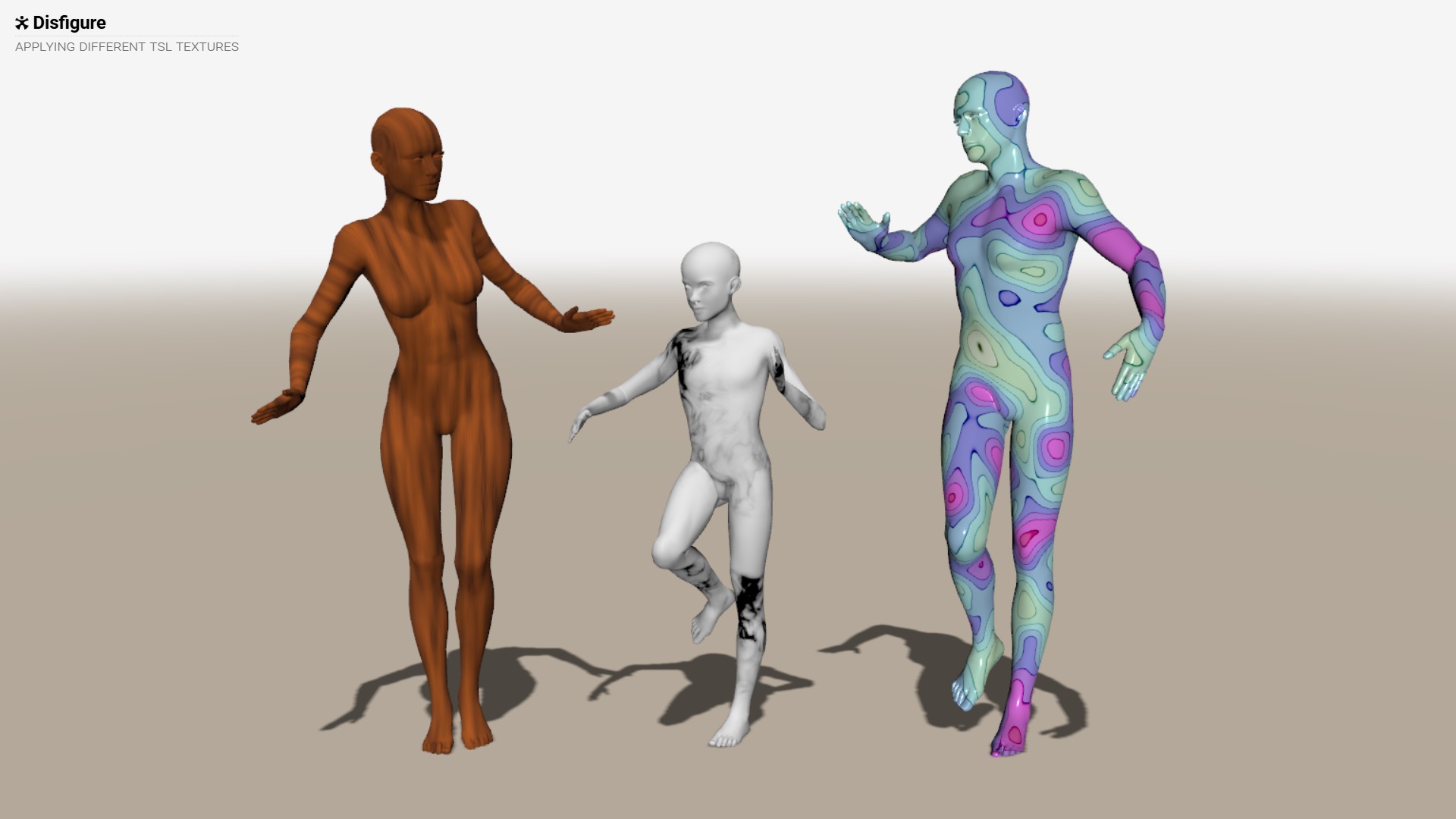
Figure dressing
Disfigure supports a painting interface to draw simple shapes directly onto the
surface of a figure. The dress method of a figure sets its clothing - an array
of range and material functions. The range function selects a portion of the
figure surface, called slice, and the material function applies a clothing
material to it. The structure of the clothing is:
[
material, // default clothing material
slice_1, material_1, // optional clothing materials
slice_2, material_2,
...
slice_N, material_N
]
The material is the mandatory default clothing material for the whole figure. The next optional slice-material pairs define slices and materials for each slice.
figure.dress([
velour( 'black' ),
slice( 1.1, 2, {angle: -20} ),
velour( 'red' ),
slice( 1.15, 2, {angle: 35} ),
velour( 'red' ),
...
];
Live example: uniform:

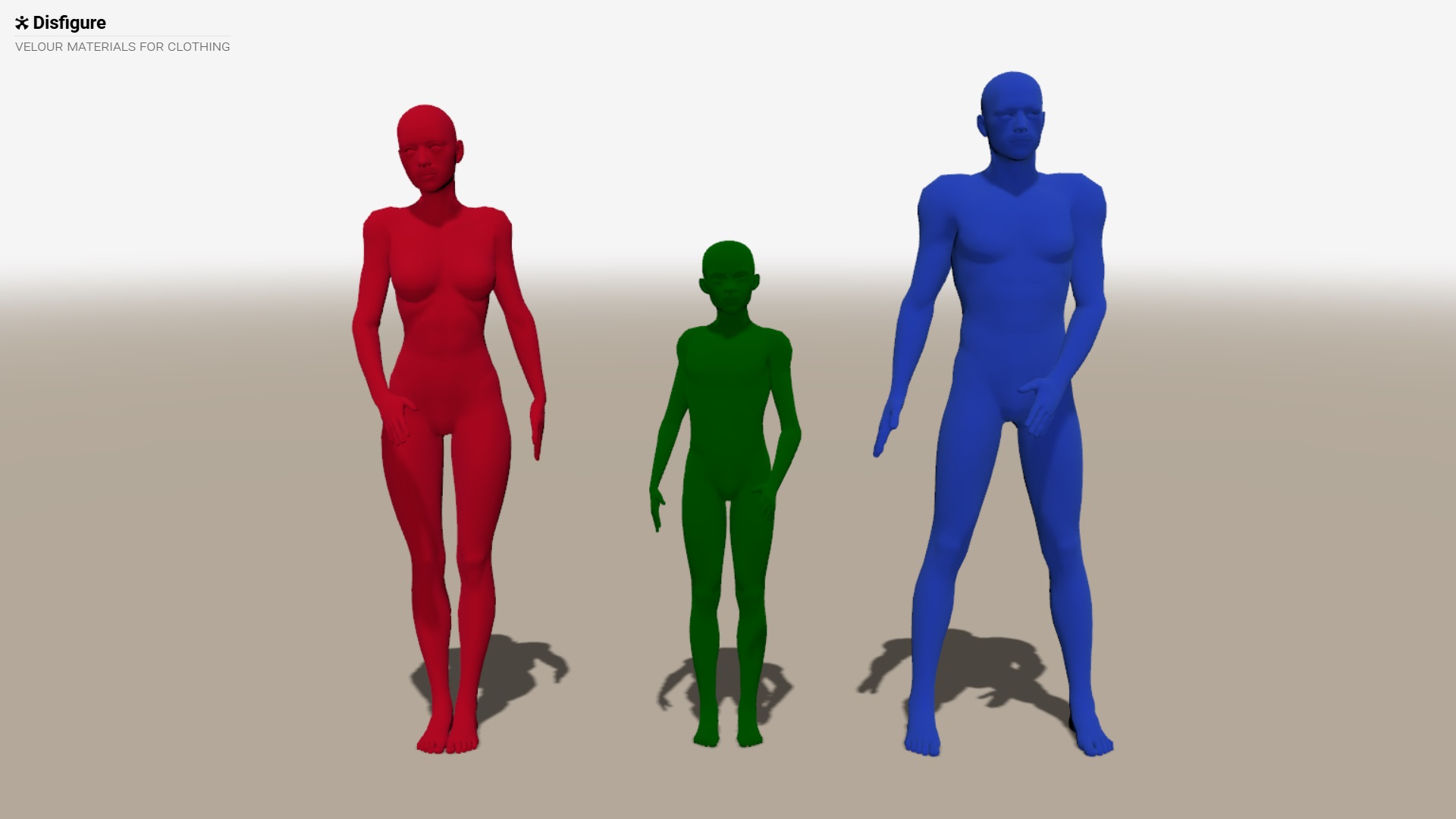
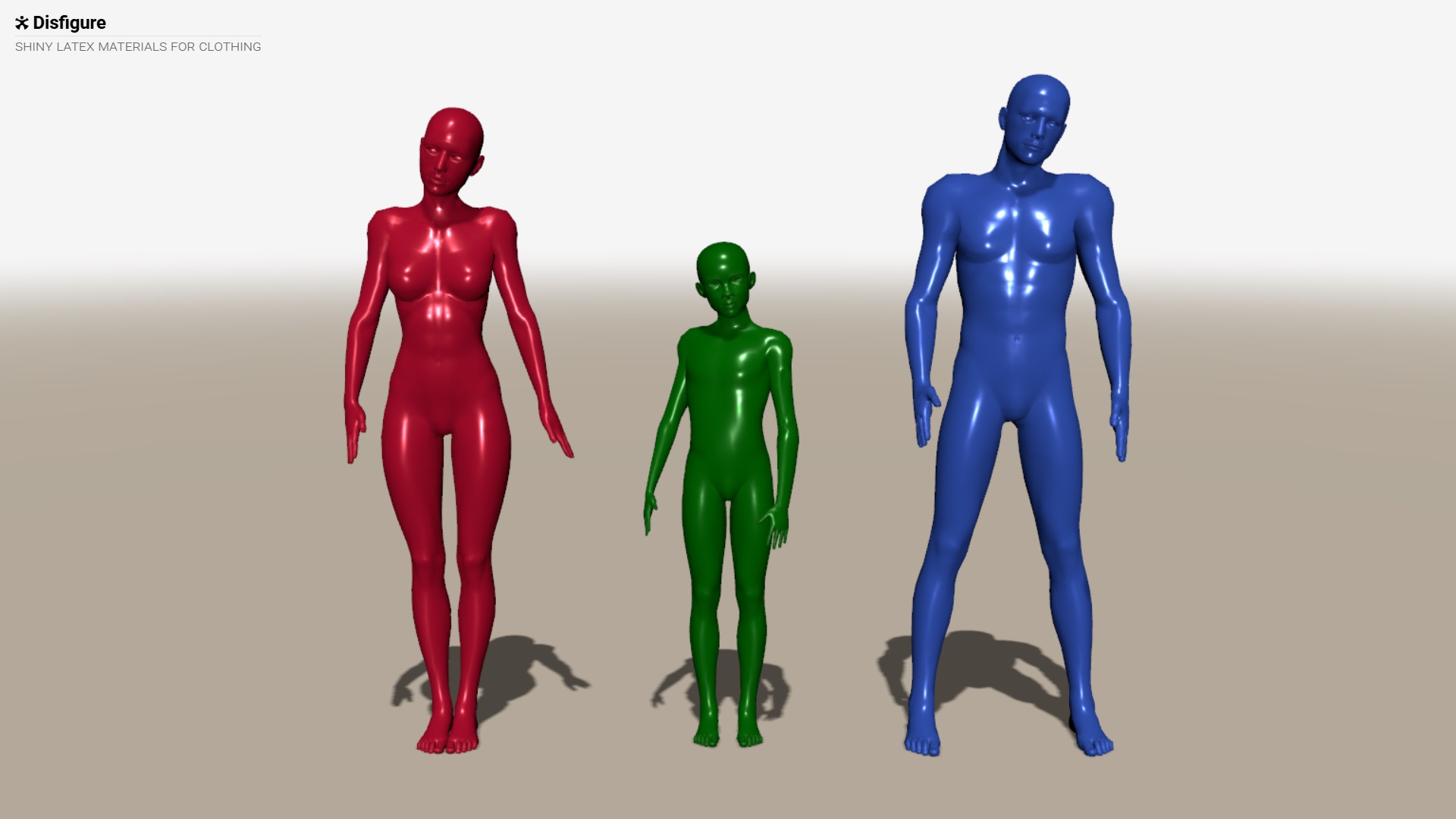
The clothing materials velour and latex define matte and shiny material. They both accept a color parameter is either a Three.js color or a HTML/CSS color name.
velour( 'green' )
latex( 'red' )
Live examples: velour clothing and latex clothing:
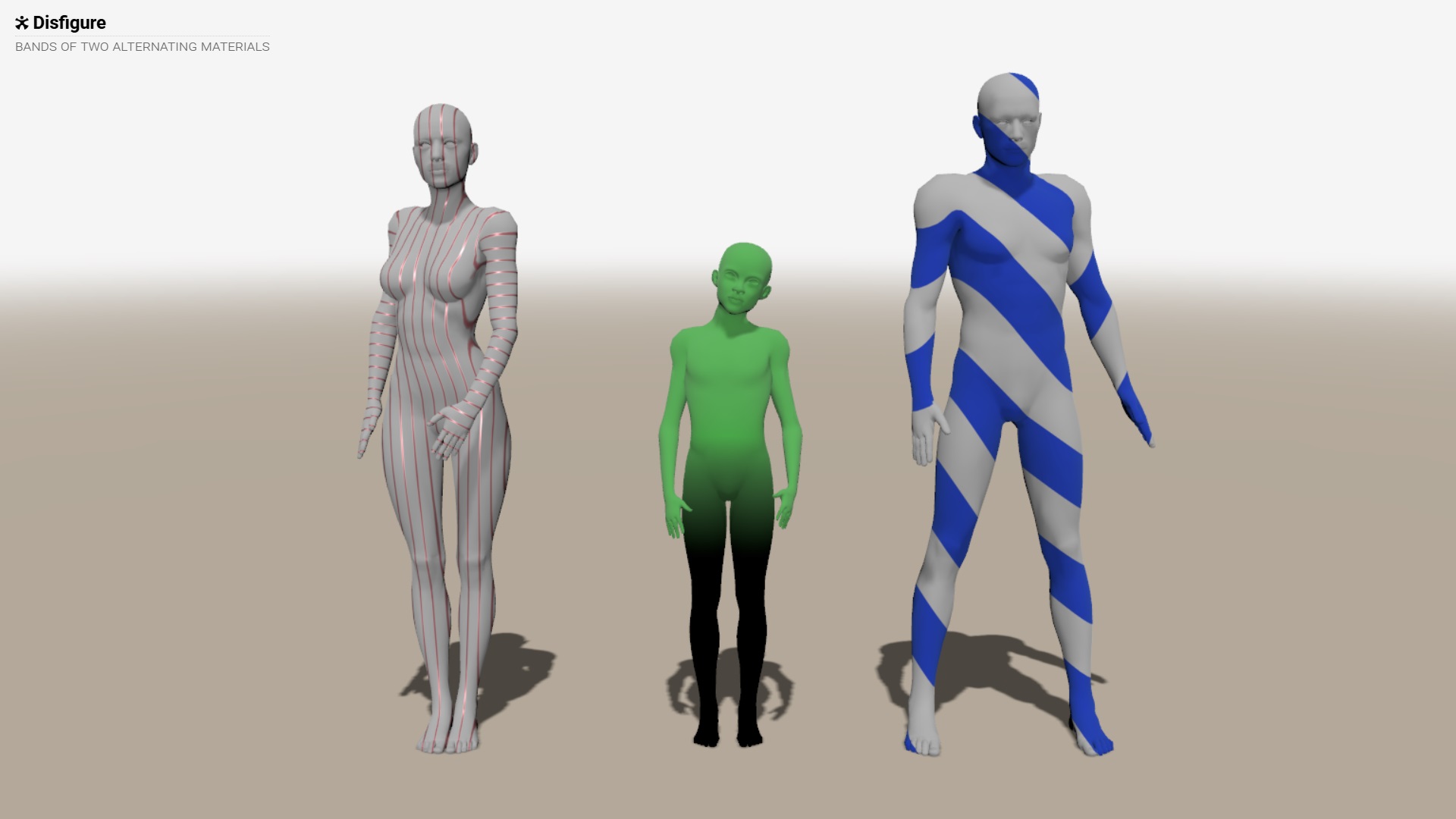
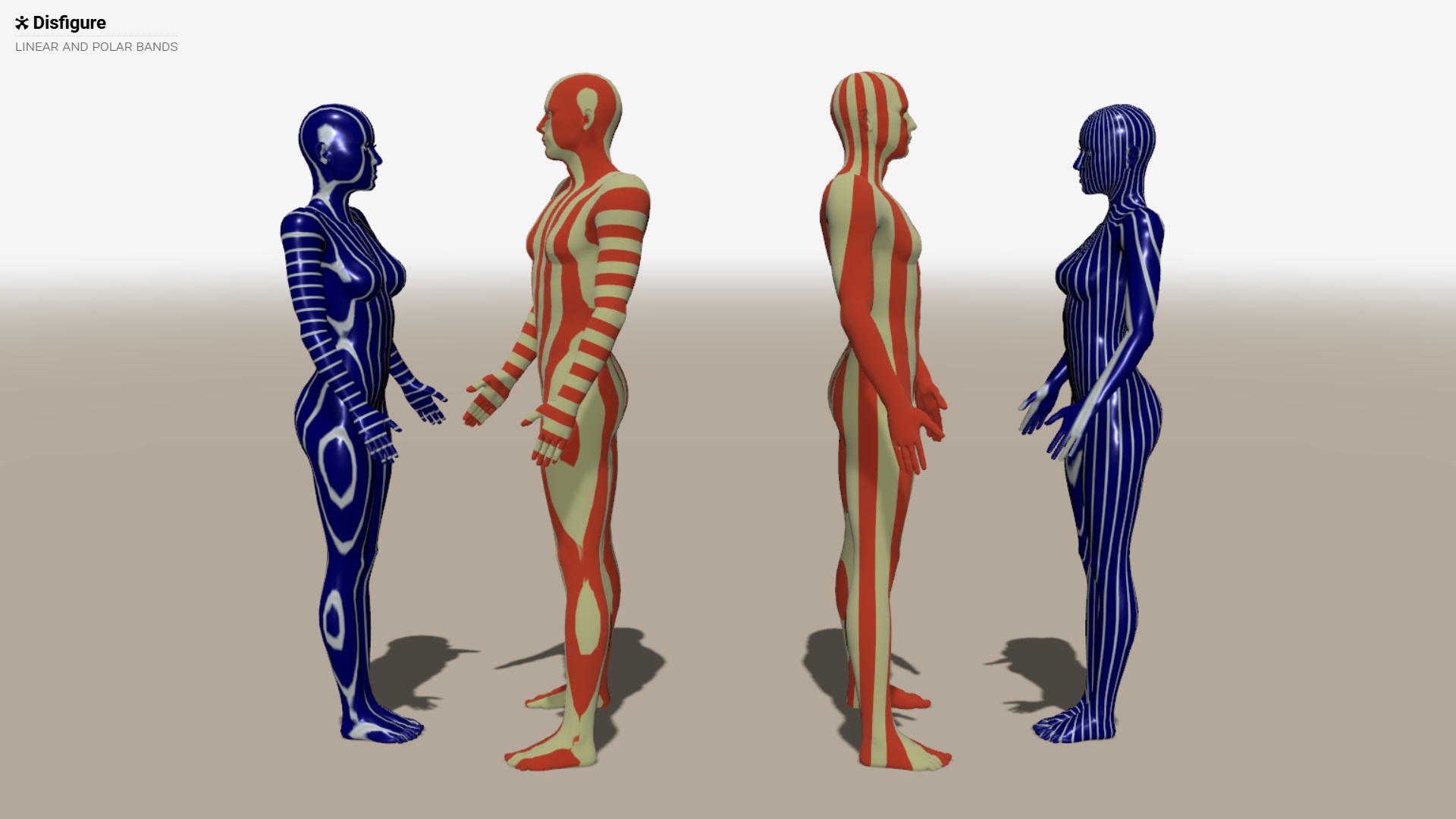
Two clothing materials could be combined by bands of given width, alternating them horizontally, vertically or diagonally. Optional parameters provides additional properties for the bands. Adequate blurring of the bands may improve their visual appearance, especially when they are too close or too far.
Polar bands revolve around a vertical axis. They are more suitable for bands that go around a body part.
bands(
latex( 'crimson' ),
velour( 'azure' ),
0.015,
{ balance: 0.9, blur: 0.2, angle: 90 }
)
Live examples: bands and polar bands:
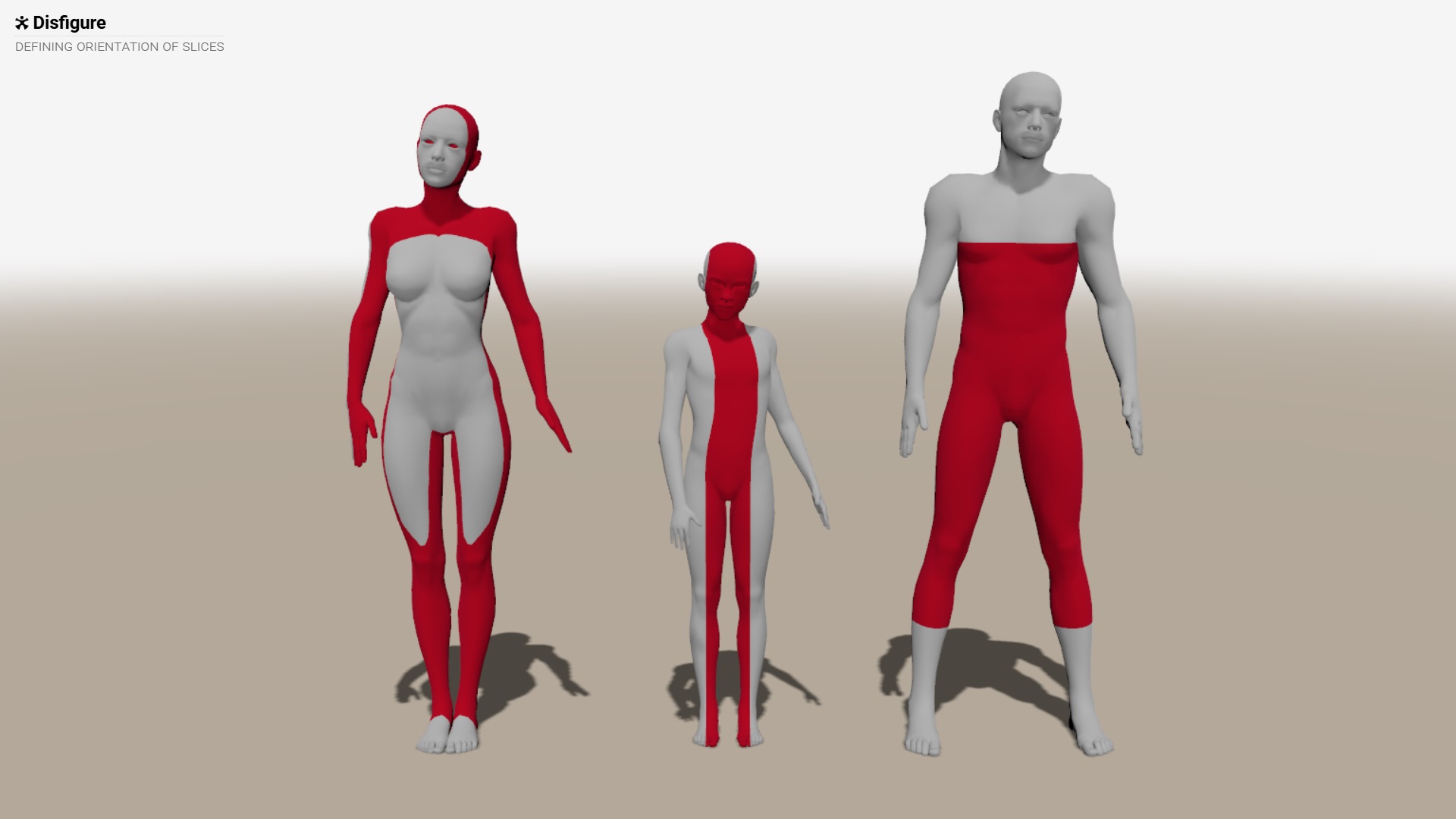
The slice function defines a slice of a figure – this is a part of the figure that is dressed in given material. Parameters from and to define the start and the end of the slice, measured in meters. By default, a slice is horizontal, thus from and to denote distance from the ground. The optional options parameter provides additional properties for the slice like their orientation and symmetry.
slice( -0.07, 0.03, {front: true} )
slice( 0.70, 1.40, {angle:55} )
Live examples: slice and angled slice:
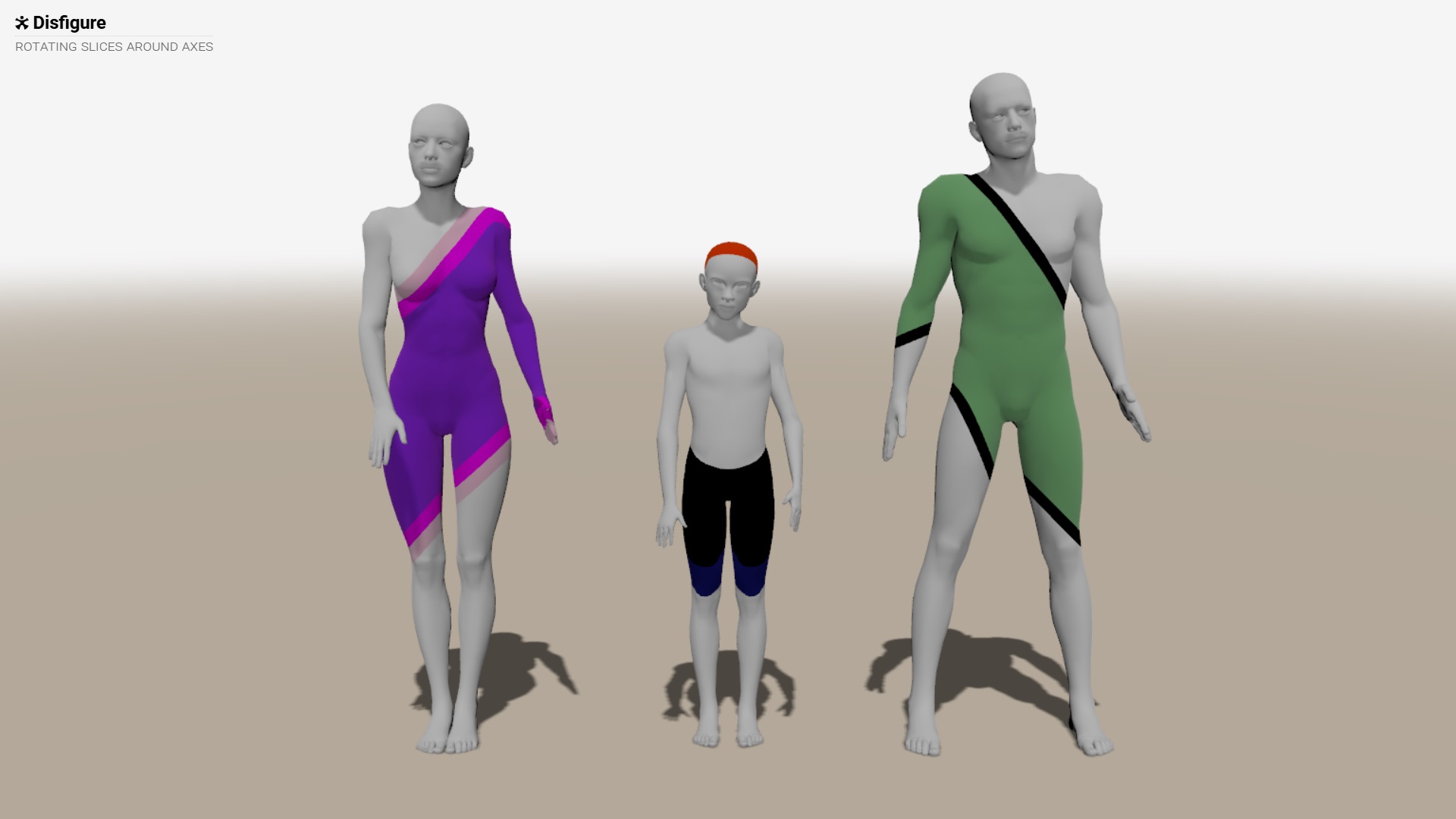
Additionally, slices could be curved as a wave when a non-zero wave option is provided.
slice( 1.3, 2, {wave:0.15, width:0.1, sharpness:1} )
Live example: slice wave:

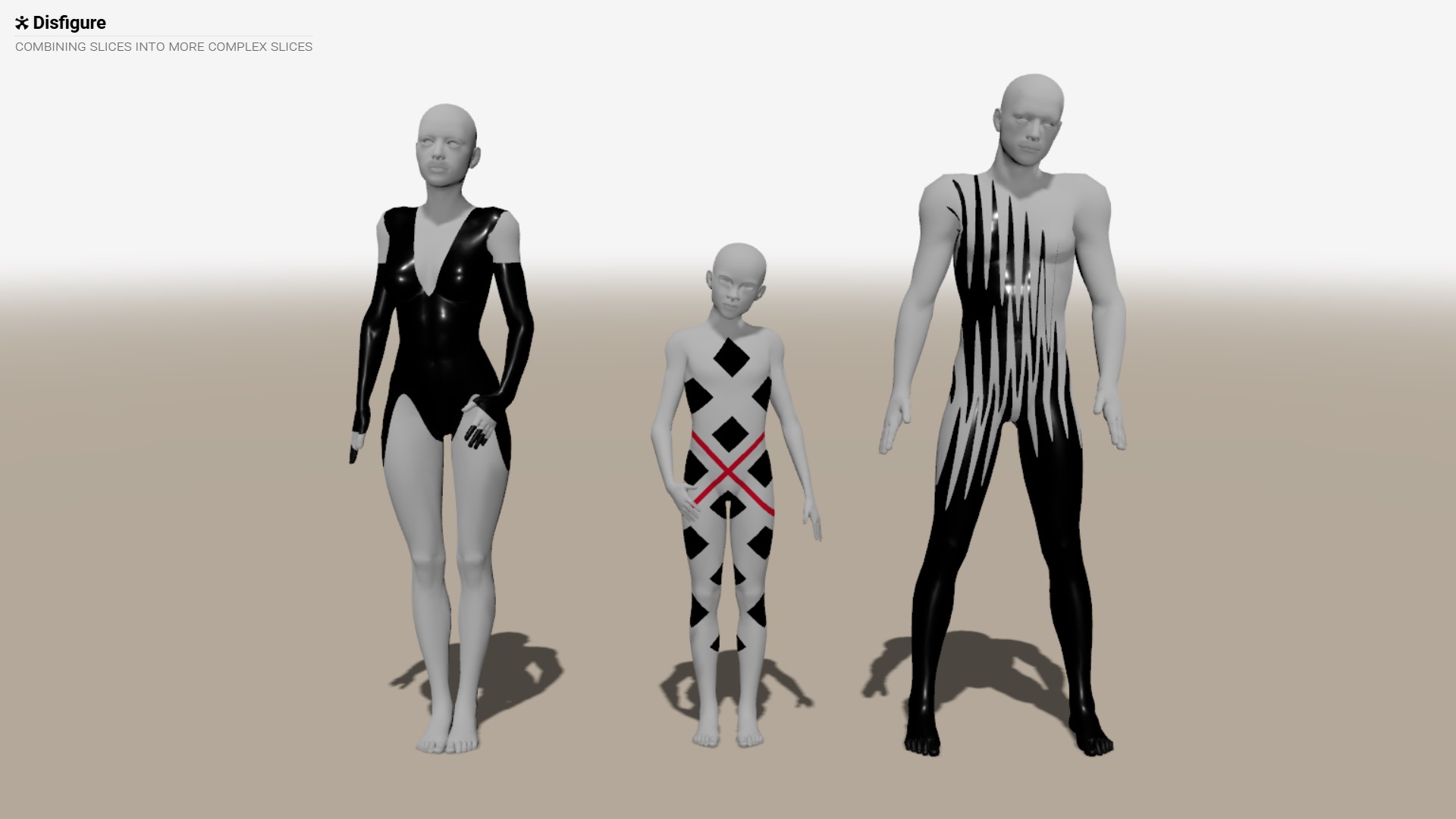
Slices can be combined into more complex shapes by intersecting or uniting them.
The function and intersects two slices, e.g. slice_1.and(slice_2) generates
a slice containing all points both in slide_1 and in slide_2, while or
unites two slices, e.g. slice_1.or(slice_2) generates a slice containing all
points either in slide_1 or in slide_2.
slice( -0.1, 1.1, {angle:45, wave: 0.3, width:0.02} )
.and( slice( -0.3, 0.9, {angle:-45, wave: 0.3, width:0.02} ) )
.or( slice( -0.2, 0.2 ) )
Live example: combining slices:
Using Disfigure
Provisional world
Disfigure provides a predefined default 3D world with all basic options, like camera, lights, ground, user navigations and so on.
Options for the environment:
- antialias – boolean, if false, antialias is turned off (default is true)
- ground – boolean, if false, ground is not created (default is true)
- lights – boolean; if false, lights are not created (default is true)
- shadows – boolean, if false, shadows are not created (default is true)
- controls – boolean, if false, orbit controls is not created (default is true)
- stats – boolean, if true, stats panel is created (default is false)
Options for figure:
- men – number, allocated number of men figures (default is 3)
- women – number, allocated number of women figures (default is 3)
- children – number, allocated number of children figures (default is 3)
- population – number, allocated number of figures (may differ from men+women+children, default is 9)
- smooth – boolean, if false, render figures with low-quality but faster smoothing (default is true)
- lowpoly – number 0 to 1, reduction factor for figure complexity (default is 0, no reduction)
new World( {ground: false, stats: true, men:100} );
If a provisional world instance is created, it adds global variables:
- renderer – WebGPU renderer
- scene – default scene for all figures
- camera – perspetive camera
- light – static directional light with shadows
- cameraLight – dynamic directional light
Depending on options initialing a world may also create:
- ground – ground for illusion of a solid surface
- controls – orbit controls for primary navigation
- stats – stats panel for performance monitoring
It is not compulsory to the a provisional world. A program may dafine its custom Three.js world. In this case the figures should be added to the scene via their pool property, and the animation loop must call update method:
var man = new Man( );
scene.add( man.pool );
function animationLoop( t ) {
man.update();
...
renderer.render( scene, camera );
}
Live examples: variation of default world and customized world:


Local positions
Disfigure provides additional methods for querying and managing positions
besides the traditional .position property.
The pointAt method extracts the global coordinates of a point related to
a body part. Each body part has own coordinate system and the point is defined
in this local coordinate system.
The lockTo moves the whole figure so that the local point of a body part is
mapped to the global point. This can be used to keep a figure standing on the
ground (by locking its feet to level 0).
pos = figure.l_arm.pointAt(0,0.1,0);
figure.l_wrist.lockTo(0,1.5,0,0.2, -0.01,0.01);


Using with CDN
Content Delivery Network (CDN). serves as a host of the library files. At the time of writing this document it is recommended to use jsDelivr as CDN. Other CDNs are also available.
The main advantages of using a CDN are:
- there is no need to install disfigure.js
- there is no need to install node.js or another JS module manager
- there is no need to install a local web server
- a user file can be directly run in a browser
The main disadvantages of using a CDN are:
- internet access to the CDN is required at program startup
- pointers to three.js and disfigure.js must be defined as importmaps
A minimal program that uses Disfigure.js from a CDN needs to define 4 import
maps: three, three/webgpu, three/tsl and three/addons. Preferably
disfigure could also be defined.
<!DOCTYPE html>
<script type="importmap">
{
"imports": {
"three": "https://cdn.jsdelivr.net/npm/three@0.184.0/build/three.webgpu.min.js",
"three/webgpu": "https://cdn.jsdelivr.net/npm/three@0.184.0/build/three.webgpu.min.js",
"three/tsl": "https://cdn.jsdelivr.net/npm/three@0.184.0/build/three.tsl.min.js",
"three/addons/": "https://cdn.jsdelivr.net/npm/three@0.184.0/examples/jsm/",
"disfigure": "https://cdn.jsdelivr.net/gh/boytchev/disfigure@main/dist/disfigure.min.js"
}
}
</script>
<script type="module">
import {World, Man} from 'disfigure';
new World;
new Man;
</script>
Live example: minimal CDN:
Note: many of the examples in this document use the script importmap.js
to generate the import maps and inject them in the page. This is done solely
for maintaining shorter code and to easily switch to other versions of either
Three.js or Disfigure.js.
Using with local web server
A local web server could provide files just as CDN. The only change is the
importmap – it should point the local files. Note that all files must
be accessed via https.
The main advantages of using only local files are:
- no internet access is required
- no need to install node.js or another JS module manager
- protection from a breaking change in the online libraries
- a user file can be directly run in a browser
- user code can use modules and can be split in several files
The main disadvantages of using only local files are:
- disfigure.js and used three.js files must be downloaded
- a local web server must be installed
- pointers to local three.js and disfigure.js must be still defined as importmaps
Using with node.js
The library is provided as a NPM package. If node.js is installed on the user machine, it should be possible to install disfigure.js and use it directly.
The main advantages of using node.js:
- no internet access is required once the package installation is done
- no need to use import maps (the whole importmaps section can be omitted)
- protection from a breaking change in the online libraries
The main disadvantages of using using node.js:
- node.js, three.js and disfigure.js must be installed
Note: This approach is not tested. If you find that it is not working and you know how to fix it, please get in touch.